第8回 閉空間におけるアクティブコントロール(前編)/
音や振動のアクティブコントロール
これまでご説明してきた考えでは、ターゲットとなっているエリアや容積からなる空間がどの様に構成されているかということは考慮せずに、波の励起や波の伝播を直接制御することを扱ってきました。これまでのアプローチでは、音源にアクセスすることができない場合や、いろいろな方向からやってくる沢山の波によって音場が特徴付けられている様な場合にはうまくいきません。そのような場としては、反射境界がある境界エリアで見つけることができ、それ故に共振が生じます。そのような多くの場合、アクティブ制御対策を部分空間に制限したり、もしくはそれをモード分解に基づかせるほうが簡単です。
図1は、容積全体にいくつかの音源が分散している状況で、その影響を励起点で制御したり、アクティブに遮蔽することができない場合の一例を示しています。この様な場合、残っている唯一の可能性としては、アクセス可能な容積上に二次ソースを適切に分布/適用することにより制御することです。
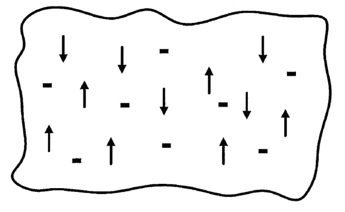
図1 境界のあるエリアにおけるアクティブ制御の原理図
その場合に、場の制御を全空間(グローバルフィールド制御)に対して行うつもりなのか、もしくは選択された部分空間のみ(ローカルフィールド制御)に対して行うつもりなのかで選択が分かれます。その際、この空間が閉じられた容積(例えば、航空機のキャビン)として与えられているのか、または構造的な要素(例えば、ビームまたはプレート)として与えられているのかという点は重要ではありません。
全空間を考慮する場合、その場のモードの種類(タイプ、描写)は、場の種類(タイプ、描写)と制御(複素モード振幅)の為の独立したパラメータを提供するという利点を持ちます。ある特定のモード振幅に絞った抑制と低減に行うにあたり、それらのモードが励起されると同時に計測することが出来ると仮定します。あるモードにとって検知点が節となる点や線となっていて、計測も低減も出来ないということがあってはいけないので、全ての検知点及び作用させる点を適切に選択/配置することが最初に必要です。
測定点およびアクチュエータの数を固定する場合、制御されるべきモードの数に加えて、単一のソースがすべてのモードを励起させてしまう可能性も考慮しなければなりません。したがって、あるモードを抑制させたくても、多くの場合に他のモードを逆に励起させてしまうことがあります。
「スピルオーバ」としばしば呼ばれるこの事実は、望まないモードを励起しない様にする為に、制御するモードの数以上にソースの数を必要とするかもしれません。モードを計測及び分析中に、そのモードに良く似たモードが混在してくる可能性もあります。従って、同様の注意を払う必要があります。
望ましくないモードを考慮に入れる必要がある場合、一般的にモードの総数はトランスデューサによって与えられる自由度の数以上になります。このようにして決定された方程式及び対応する制御則では、モード振幅の平均二乗誤差が最小化されるという条件で独自の解を持ちます。
特別な場合としては、力が線スペクトルで駆動される場合の様な単一の力によって、明らかに別々の周波数を振動する非結合モードを制御することが上げられます。
モーダルアプローチは、関連するモードの数やモード密度が互いに影響を及ぼしあっている場合には、基本的にアクティブ対策を施すことが出来ません。それから、グローバルフィールドの様なオープンスペースでは、ソースを複製したり遮断することによってのみ補正は実現できる可能性があります。さもなければ、その効果は1点またはいくつかの測定点の周りの小さなゾーンに限定されてしまいます。
これはモード分離することなしに、すべての測定点の平均エネルギーを直接的に最小化するという実用的なアプローチになります。音場の場合、これは計測可能な平均二乗音圧の低減を意味し、一方、構造体の場合では、平均二乗速度を最小化することによって放射されるパワーの低減を得ることができます。
これらのアプローチによる潜在的な応用としては、振動工学の領域において、大きく重量が減ったとしても動的な特性を確保する為の大きな構造物に対して広く、集中しています。航空機の翼のような構造物をアクティブ手法で強固にする方法の様な基礎研究の他にも、大きな容積を持つ構造に対しても使用されているという点で、アクティブ手法が多くの仕事で使用されようとしています。
少なくとも、あらゆる構造要素が均質な連続体としてモデル化され得る限り、波動伝播としてのアプローチは、位置合わせや励起する場所の制限、自由度の少なさという点でモーダルアプローチと比べていくつかの利点があります。
閉じた容積での空気伝播音場の場合、上記内容から波長に比べて考慮する容積の寸法が小さいほど、制御がより容易になると言えます。小さな寸法に対するより高いモードは、高周波によってのみ構築される為、アクティブ対策は考慮されるべき最も高い周波数に依存するいくつかのモードに限定することが出来ます。場の物理量の高調波波形が今後の挙動として良好であると予測されているならば、場のアクティブ制御はあらゆる条件で効果的になります。
初期のアクティブ手法の最も有益な応用は、アクティブイヤホンによって与えられました。その理由としては、アクティブイヤホンは極めて小さい容積を持っており、この様な小さな容積では数KHz以下において空間的に一定の音圧のみを持つ基本モードで特徴付けられるからです。過去30年間にわたり今日まで、様々なヘッドセット製造会社から様々な標準製品が提供されてきています。これらの解決法は、好ましくない外部ノイズに対して、低周波側広帯域での遮音(典型的には1kHz未満)機能を持つ耳保護具やヘッドセットとは異なるものです。このようなアクティブ手法により、望まれる信号(音楽または音声)の受信を本質的に改善することができます。
任意に到来する広帯域音響信号は一般に予測不可能ですので、これらの耳に関するシステムは上限周波数が信号遅延時間により決定されるフィードバック制御を必要とします。ラウドスピーカを統合することにより、あらゆるアクティブ耳保護具がイヤホンにとってかわります。また、何本かのエラーマイクロフォンが必要です。
図2はパイロット用のヘッドセットの遮音の具合を示したものですが、アクティブノイズ抑制システムを使用することで、600Hz以下で最大35dBまで低減することが出来たことを示しています。
容量が大きい場合、容量が大きいほど音場の空間依存性を考慮しなければならない周波数値が低くなっていきますので、事態はより複雑になります。その場合、アクティブ音場/振動補正を適用するにあたり、必然的に振幅と位相の空間的関係の再現性を確認する必要があります。これは一般的にいくつかのラウドスピーカを必要とし、上限周波数が高く設定されているほどそのラウドスピーカの数は多くなければなりません。
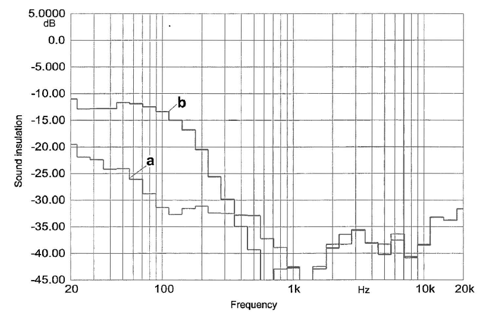
図2 パイロット用ヘッドセットの遮音
(a: アクティブノイズ抑制有, b: アクティブノイズ抑制無)