第2回 技術的発達の歴史 /
音や振動のアクティブコントロール
「(電気機械的に)制御された干渉によるノイズ消去」としてアクティブノイズ低減の考えに関して記載された最初の書面は、1933年から1934年にP. Luegによって取得されたいくつかの特許の中で見つけることが出来ます。注目すべき点としては、それらの特許はその後数十年にわたり最初の実用的な試みの中心になった二つのアプローチの内容を含んでいたことです。そのアプローチとはすなわち、適切に配置された二次音源(セカンダリーソース)の近くの任意音場の制御、及び一次元的な波伝播への制限です。
そのような制御の最初の結果は1953年にOlsonによって発表されました。彼は図1に示した様な基本的な制御ループにより原理的に低減が行える構成を研究しました。 逆相で増幅されたマイクロフォン信号でスピーカを駆動することは、マイクロフォン位置における音圧の変動を補正することを目的としています。一次(プライマリー)音場と二次(セカンダリー)音場で波の伝搬方向が異なる為、音のレベルが低減する領域はマクロフォン周辺の近傍に限られます。
音の低減が適用出来る領域は音場の波長に比例しますので、アンチソースの空間的な有効性は低周波側で増加します。このことは、どの様な信号処理でも低いサンプリングレートの場合のほうがより容易に行えるという事実によって強調されているあらゆるアクティブ対策の重要な特徴の1つです。低周波領域での受動的(パッシブ)手法のアプローチが難しいこともあり、アクティブ手法のアプローチの魅力を高めています。
代表的な結果として、Olsonは0.5メートルまでの距離かつ60 Hzの中心周波数で、1~3オクターブ内で音圧レベルを10~20 dB程低減させることができました。
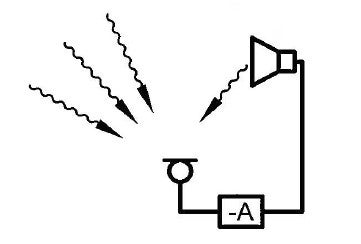
図1 マイクロフォン位置における音場の制御
音圧レベル低減の限界は、高い増幅度で生じる不安定性により引き起こされます。それにもかかわらず後年、このシンプルなアプローチはさまざまなアプリケーションで成功を持って支持されました。Leventhall等は一次元導波管内の音圧を制御することによって約20 dBの低減を達成しました。
Olsonはこの手法で多くの潜在的な応用が出来ることを指摘しましたが、実用的な用途にさせる為には長い道のりを必要としました。この理由としては、高速信号処理の限界があったことや、この手法に関する物理的メカニズムの理解不足がありました。電気変換器分野での成功により実際に直面する困難さを過小評価してしまったことで、アクティブ対策技術はその後一時的に衰退しました。
アクティブサウンド制御の可能性に対する新たな関心が寄せられるまでに、その後10年から15年の年月がかかりました。電子信号処理の飛躍的な進歩と共に、アクティブ制御をシンプルな音場あるいは一次元音場へ一時的に制限をかけることで、成功を促進出来る見通しがたちました。
このようにSwinbanksやJessel及び彼のグループが実施した基礎研究は、間もなくして素晴らしい実験結果を導きました。代表的な成果としては、単一周波数の音では最大50 dBの音圧レベルの低減、広帯域の音では10~15 dBの音圧レベルの低減を実現しました。
振動制御分野における技術的進展としては、音圧制御の場合と同様な進展があったものの、それとは異なる発展も見られました。機械的に駆動される位相をずらした発生源(ソース)によって構造物の加振を低減するという初期の試みは、Swinbanks(1984年)の文献(The active control of sound and vibration and some applications in industry)で確認することが出来ます。Olsonが自身の考えにおける振動制御の応用の実現を望んで以降、RockwellとLawtherは梁の曲げ波モードをアクティブ的に最大30dBまで減衰させることに成功しました。その一方で主な理論的研究はTartakowskijと彼の同僚によって行われました。
一方、振動制御に関する実際の対策の実現可能性の見込みがあると分かり、そのことが さらなる関心を引くようになるまでにさらに10年かかりました。アクティブ振動制御に関する文献やその文献で引用された参考文献内で関心が持たれていた分野としては、機械工学、宇宙技術、及び土木工学に集中していました。
アクティブ振動制御のタスクとアクティブサウンド制御のタスクの間には密接な関係があるにもかかわらず、両方の領域の研究については互いにほとんど言及されていません。このようにして、放射構造のアクティブ制御により音を低減するという目的の為に、この制御原理を適用する為の具体的な方法が1967年からまとめられてきました。
アクティブサウンド制御やアクティブ振動制御への関心、及びそれらの可能性への関心が著しく高まったのは1980年代になってからでした。その結果として、非常に多くの基礎研究プロジェクトや応用寄りの開発プロジェクトが、技術的応用分野を含むあらゆる分野に対してアクティブ制御によるアプローチが原理的に実現可能かどうかを体系的に調査しました。しかしながら、実用の可能性があると判断されたにもかかわらず、それが実際に実装された数は少ないものでした。
この理由としては主に、適切な電子装置及び電気機械装置を使う為に多額の費用がかかってしまうことや、それら装置部品への長期的な堅牢性の信頼がないことからでした。しかしながら、ふさわしい用途においては機械的波場及び音響的波動場のアクティブ制御は非常に大きな利点を持っており、それ故最も有益な技術的アプローチの1つとみなすことができます。これら詳細内容については以降の回でご紹介していきます。