第7回 波動伝播のアクティブコントロール(後編)/
音や振動のアクティブコントロール
具体例として、16個のラウドスピーカーと24個の計測用マイクロフォンを用い実験室に配置し、200~500Hzの間で30dBまで減衰させることができ、一部周波数範囲を遮蔽できるという結果を得ました。
しかし他の実験、例えば変圧器の音響遮蔽の実験では、広い領域における効果的なレベルの低減には高い努力が必要であることが明らかになりました。 したがって、このラウドスピーカーによる音響遮蔽は機能的であることは証明されていますが、アクティブな遮音壁について実用への適用は三次元波の伝播に対してはほとんど期待ができません。
しかしながら、回折角を低減させるというアプローチにより、つまり遮音壁の先端部(エッジ部)において最適なインピーダンスをアクティブに実現することにより、遮音壁の遮蔽効果を向上させるという例が存在します。局所的な固有”インピーダンス”は、回折に関する遮音壁の全体的な挙動を十分に表すため、三次元空間における波の空間伝播をモデル化する必要はありません。
図1では、遮音壁がアクティブな手段によって遮音制御される場合において(図1内(c))、音圧レベルが200~600Hzの周波数範囲で約4~8dB(図1内(a)と(c)の比較)だけ低減されたことを示しています。また、パッシブな吸収端を有した遮音壁(図1内(b))と比較しても、約2~5dBだけ更なる改善を与えます。
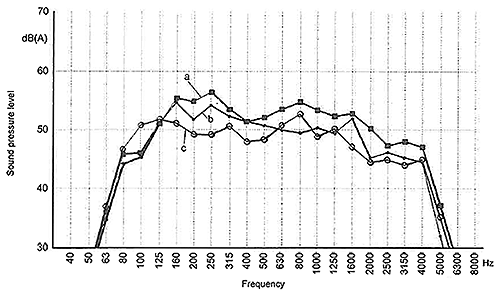
図1 音圧レベルの比較
(a)パッシブな対策なしの遮音壁 (b)パッシブな対策ありの遮音壁 (c)アクティブソフトエッジを適用した遮音壁
*アクティブソフトエッジ=回折音低減を狙って、遮音壁先端部をアクティブに制御したもの
多次元波の伝播の制御に課せられた制約は、1次元という特殊な場合には適用されません。特に、あるカットオフ周波数以下では、限られた数の波の種類または形態でのみ伝播性があり、この伝播はより少ない努力で効果的に制御できます。図2のようなダクトの音場のアクティブコントロールを例に示します。
ダクトにおける条件は、音波の波長に対してダクト径が十分に小さいことが最も好ましいです。この場合平面波のみが伝播し、発生する体積流がどうダクトに伝わるかは問題になりません。ダクトのせん断面にわたってモノポールとダイポールを配置する代わりに、独立に制御されたラウドスピーカーを図2のようにダクト壁面に取り付ければ十分です。
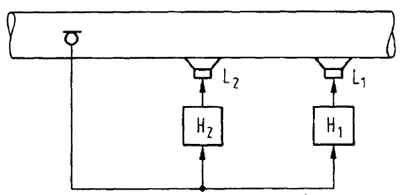
図2 ダクトの音場アクティブコントロール
二つ近接して配置されたモノポールにより、ダイポールと近似され帯域幅が制限されます。追加のラウドスピーカーによってこの帯域幅を広げることができる、ということがSwinbanksにより示されています。
図2は一つのラウドスピーカーのみ(H2=0)という特殊なケースを含んでおり、当初は実験実施においてシンプルな構成なため好まれていました。入射する音場が打ち消される様にラウドスピーカーL1は駆動され、L1の後方では消音されます。 [第6回]の考察と同様に、アクティブな反射機構を有するこの構成では、ラウドスピーカーL1によって反射された波がラウドスピーカーL2によって吸収されるようにL2を用い駆動することによってアクティブな吸収体に拡張することができます。
これらのアプローチの実現可能性を実験的に証明したのち、実用への適用のため、レベル低減および帯域幅および連続的な伝達に関して結果の改善のため多くの試みがなされてきました。これは、広帯域(30~650Hz)において20dBのレベル低減を提案したLa FontaineとShepherdの研究によって実証されました。またRoureはアダプティブフィルタを用いて図3の結果を得ました。
アクティブな音響減衰は、低周波数ではマイクロフォンにおける不安定な入力によって、一方高周波数ではより高いモードによって制限されます。
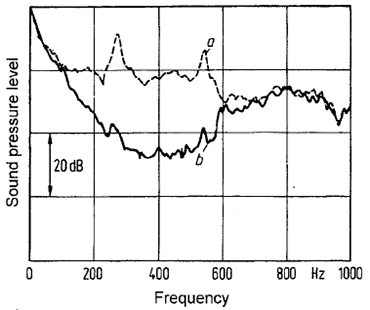
図3 ダクト内の音圧レベル
アクティブな音響減衰 (a)なし (b)あり
周波数帯域の拡張に加え、ラウドスピーカーの数の増加は、追加のモードを補正するために使用されます。従来理論的に研究なされていませんでしたが、工業プラントでは実用的には使用されてきました。
一次元波伝播でのアクティブな対策について典型的な適用例は、エアコンと排気のシステムです。例として[第5回]のガスタービンの例を挙げます([第5回]の図2)。この適用例では、外部放射音の抑制は、ダクトについては、排気口における全体の抑制を意味します。更なる排気システムについてのアクティブシステムの例はいくつか見られ、音源近くのラウドスピーカーにより直接的に抑制した例も見られます。
波動伝播の制御は空気伝搬する音波の限りではありません。図4は、梁の曲げにおいて、適切に駆動されたアクチュエータにより曲げ振動が吸収される例を示しています。平均32dBの弾性係数の減衰は、梁の自由端での電磁式加振器によって、また、パッシブに制振された曲げ振動よって得られます。このように、入力の99.95%は吸収されます。
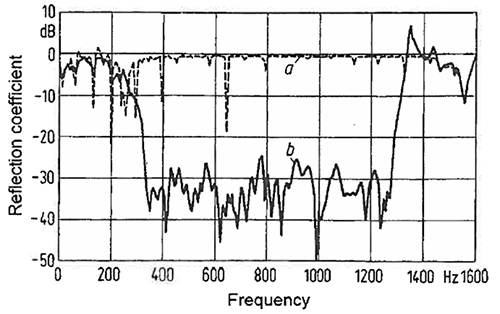
図4 弾性係数 梁の自由端にアクティブなアブソーバー (a)なし (b)あり
これはまた、[第4回]で記載したように、多モード共鳴の抑制をもたらすアクティブな構造の減衰の可能性を表しています。このアプローチは、モード振幅の直接制御と比較した場合いくつかの利点があるため、いくつかの構造の動的特性の用途に役立ちます。
梁状の要素を介した機械的振動伝達の抑制が、ヘリコプターのキャビン内のギアボックスの騒音を低減するためにも適用されています。
産業用の排気システムに加え、自動車のより小さな排気および吸気システムもまた対策の対象となります。出力の大きなエンジンは排気システム内に高い音圧を発生させるので、どのような補正用アクチュエータも出力と温度に関して高い要件を満たす必要があります。そのため、ラウドスピーカーの代わりに、振動板の様な代替えのアクチュエータを使って排気の流体を考慮した上で直接変調させることもあります。しかし、柔軟性が高いため、実際には空冷管を介してうまく結合されたラウドスピーカーを使う傾向があります。
図5は、実績のあるアクティブなサイレンサー(曲線2)はパッシブなサイレンサー(曲線1)と比較し、より良い騒音低減性能を持っていることを示しています。また、サイレンサー無しのシステム(曲線5)と比較し、4000rpm以下で6~12dBの、4000rpm以上で2~6dBのレベル低減があります。
残りの曲線3および4は、他の音と同様に、互いに明らかに性質が異なる2つのアクティブに実現された音を表しています。エンジン回転3次とその高調波のいくつかのわずかな減少に加えて、ある次数成分が追加されたため、レベルが引き上げられています。2.5次と3.5次の増幅は低周波振動を発生させ8気筒のような音を生み出し(曲線3)、一方で6気筒エンジンのスポーティーな特徴は4.5次と7.5次を上げることによってさらに強調することができました(曲線4)。
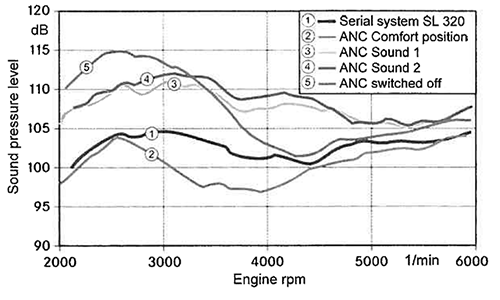
図5 乗用車の全排気騒音レベル
それに加え、広い意味での目標音の実現可能性は、標準的なマフラーと比較して、アクティブなシステムにより体積と重量を50%近く抑えることができました。しかしながら、このシステムは有効な機械的および音響的な堅牢性は示しますが、関連するコストの観点からこれまで大規模に導入されることはありませんでした。
波動伝播の制御について他の適用例では、液体で充填されたパイプ内での音伝播の抑制があります。流体のインピーダンスが高いほど、アクチュエータの設置をより効果的にします。また室内の音響特性という全く異なるアプリケーション領域でも適用されています。この音響特性は壁の反射特性に強く依存しますが、アクティブな要素による影響も考察が行われています。