第3回 アクティブコントロールの構造 /
音や振動のアクティブコントロール
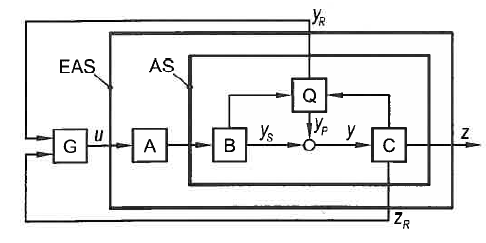
図1 一般的な構造
図1に音や振動のアクティブコントロールについての構造図を示します。音源Qは1つまたは複数の音源を示しており、発生する一次音場はベクトルYpで表現されます。アクティブコントロールの基本的な仕組みは、これらの一次音場Ypが2次音場Ysと交わる箇所で重ねられるということです。
その結果発生する音場Yは、いくつかの演算処理をされて機械的なシステムの中を伝搬します。このことは行列のブロックCとアクティブコントロールのターゲットであるZで表現されています。このターゲットZは、出来る限り理想とするZsに近づく様にします。アプリケーションに応じて、ZとZsの仕様は下記した様なそれぞれの設計目標によって変わります。
- 1つまたは複数の場所で、音場、または音の強さをキャンセルする(Z=0)
- 1つまたは複数の場所で、任意の周波数帯でのスペクトラムを最適に近似する
- ある帯域での平均された音のエネルギーや振動エネルギーを最小化する
- 放射されるサウンドパワーを最小化する
同様に、音の他の特徴も考慮されます。 - スペクトラムの振幅を任意の値に調整する
- 任意の心理音響パラメータ(ラウドネスやラフネスなど)を実現する
ターゲットの定義が広範囲になる可能性があることから、これらは直接計測することが難しい場合もあります。このため効果的なターゲットを、計測やZ以外の他の音場から推定することが必要になります。計測されたすべての音は信号処理ユニットGで演算され、フィードバック信号ZRが生じます。
ブロックCからQに伸びる矢印は、発生する音場から音源Qへのフィードバック効果になります。これは、複雑な構造の場合に発生する不安定性による音や振動のメカニズムを示しています。
特にQからCを経てQに戻る閉ループは、多くの振動や波動の原因となる自励振動の構造やメカニズムを示しています。例えばこの閉ループに追加の閉ループを追加して構造を変えることで、その様な不安定性の発生を防ぐことが出来ます。 信号処理ユニットGは電気的な変換器Aを駆動するための信号uを提供し、Aは2次音場Ysを励起するために必要なアクチュエータとして動作し、Bの機械的なシステムの伝達経路を介して交差する箇所に伝わります。
最適な制御信号uを演算するために必要な情報を提供するGの入力信号は、その情報の内容により区別されます。図1の中でYRは音源Qや交差点における1次音場Ypに関する重要な情報を含むすべての信号を含んでいます。このことから、YRはしばしば参照信号と呼ばれます。一方、ZRはターゲットを推定する様な信号になります。
これまで説明してきた経路とは別に、図1のBからQへの経路でも2次音場から音源へのフィードバック効果が考慮されます。これは1次音場の歪みの他に、Qを介した2次音場によりYRに与えられる情報に対する変化をもたらします。適切な対策をしない場合、この望まれないフィードバックは誤った2次音場を発生させ、さらには第2回で説明した様な深刻な不安定性を発生させる可能性があります。
その様な不安定性に対する典型的な対策としては、2次音場に対する影響を抑制する様な計測であり、例えば2次音場の影響を受けない1次音場の直接的な計測やその様な1次音場を表現する物理量の計測です。また不安定性は、以降の章で説明するフィードバック補正により回避することも出来ます。
図1の一般モデルは、様々な構成を表現し説明することが出来ます。例えばもしQが内燃エンジンである場合、Zは排気システムやエンジンから直接放射されるサウンドパワーを表しています。また車両の基本構造に影響を与える固体伝搬のサウンドパワーも、ターゲットZを定義する際に有効です。2次変換器を駆動させるために、YRはrpm信号や2次音源上流の排気管の音圧を含みます。ターゲットに応じて、ZRは2次音源下流の排気管の音圧、事前に選定された車室内や車外のポイント、そして車両構造の中の物理量になります。
YR、Z、そしてZRを計測する装置とは別に、ブロックB、CとQは1つの音響システムASや機械式システムMSに組み込む、単一の音響(または機械式)システムになります。Aに含まれている電気機械変換器を統合することで、システムは電気音響システムEASや電気機械システムEMSに拡張することが出来ます。
この形式は、適切な(受動的な)音響/機械的な対策による騒音や振動の低減、及びASやMSにおける音響的なターゲット量の制御という古典的な課題を、電気音響/電気機械変換器を使用することで電気音響システム(EAS)/電気機械システム(EMS)というアクティブ制御能へとどの様に変換していくかということを示しています。
YPは、Zに含まれるターゲットが最小化されるように、Aに含まれる2次音源により補正されるべき外乱を表現しています。YRにYPの時間的なふるまいについて十分な情報が含まれていれば、要求される制御信号uはYRだけから算出できます。このことは最終的に標準的フィードフォワード制御になります。
これとは対照的に、制御するターゲットZ=Yとして評価することは、Y=0が目標の信号として規定される場合には、外乱ノイズを伴う標準的フィードバック制御になります。
どの様なアプリケーションでも常に、純粋なフィードフォワード制御による計測可能(YRによる)な補正、かつ外乱の影響を予測して補正ができる様なシステムが設計されるべきです。この時に初めて、フィードバックコントローラによって制御信号Yの誤差に対しての動作が意味を持つ様になります。
コントローラの構造とその適切な各パラメータ類は、1つの制御信号または複数の制御信号を使用したアナログまたはデジタル制御理論に基いて定義されるべきであり、又信号処理システムや関連システムの設計思想に基づいて定義される必要があります。