自動運転
自動運転に関する研究開発が、業界の垣根を越えて盛んに行われています。LiDARやミリ波レーダーなどセンサ類による車両周囲の監視、カメラを用いた周囲情報の取得、GPS信号による位置制御、車車間通信、路車間通信など、車両の自動制御にはさまざまな技術が利用されます。 東陽テクニカでは、自動運転/ADAS評価用データロガーをはじめ、自動運転/ADAS搭載車を評価するための各種開発・評価ツールなど最新のソリューションを提供しています。
周辺環境計測システム「XenoLidar X」

路面形状計測システム「XenoTrack-RT」

XenoTrack-RTは、ソリッドステート方式LiDARを用いた路面形状計測システムです。車両の上部に着けたLidarを用いて路面までの距離を計測し、そのデータから路面の凹凸マップを作成します。
自動運転/ADAS開発向けデータロガー「ViCANlog pro」

自動運転/ADASで使用されるカメラ、LiDAR、レーダーなどのセンサ信号やCAN、LINなどの車内バス信号などを同期して保存、再生、解析するためのデータロガーです。SDKで解析表示機能を拡張することもでき、保存した実走行データを条件ごとに分類するクラスタリング機能なども搭載可能です。
自動運転/ADAS開発向け小型データロガー 「ViCANlog light」

自動運転/ADAS開発向け小型データロガー「ViCANlog light」は「ViCANlog pro」の廉価版です。「ViCANlog pro」と異なりセンサ入力用のPCIeカードを拡張することはできませんが、入力センサ数が少ない場合には小型の「ViCANlog light」を使用できます。
Android端末データロガー「ViCANdroid」

Android端末データロガー「ViCANdroid」はAndroid端末をリモートロガーとして使用します。端末内臓のカメラ、ジャイロセンサなどのデータを保存可能であり、路上での車両テストのデータをクラウドにアップロードできます。取得データは「ViCANdo」にインポートして再生や解析が可能です。
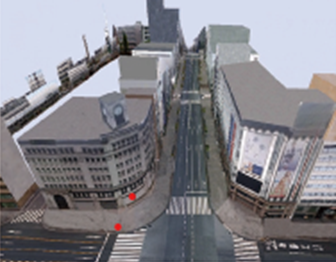
景観シーン作成サービス「Ortho Creator」

「Ortho Creator」は専用の測定車両を使用した現地計測とデータ処理までをご提供するサービスです。実映像を2D地図に自動変換可能なツールであり、道路上のクラックやかすれた白線、リアルなマンホール等をシミュレーション環境に再現できます。
景観シーン作成サービス「CVCG Modeler」
「CVCG Modeler」は専用の測定車両を使用した現地計測とデータ処理までをご提供するサービスです。実映像から3D地図/3Dモデルを生成、実映像をテクスチャとして合成し、ポリゴンに自動貼付けすることで、建物などの構造物をリアルにシミュレーション環境に再現できます。
機械学習用CG画像とアノテーションデータ提供サービス「Anyverse」

AD(自動運転)/ADASの認知アルゴリズムに使用するAI(人工知能)の機械学習用のCG画像とアノテーションデータを提供します。お客様の要求に合わせて、実走行では撮影が困難なコーナーケースや特殊な状況などのCG画像をお客様毎にカスタマイズして作成することが可能です。画像だけでなく、LiDARの点群データも提供可能です。
ヒューマンライク交通流シミュレータ「AAI Intelligent Traffic 」
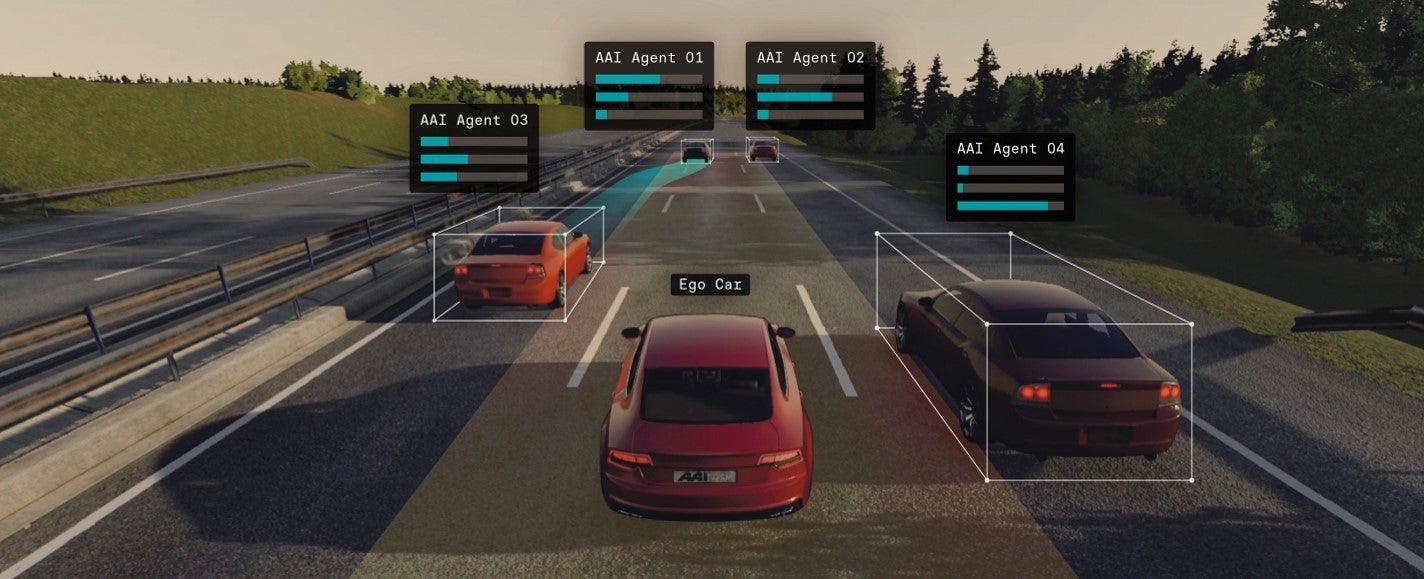
車載カメラで撮影した動画データとGPS・IMUのデータを基にして、シミュレータで使用可能な実路走行時のシナリオデータを制作するサービスです。シナリオ化されたデータはOPEN SCENARIO形式及びOPEN DRIVE形式に対応しています。
実路走行シナリオ製作サービス「AAI Scenario Cloning」

車載カメラで撮影した動画データとGPS・IMUのデータを基にして、シミュレータで使用可能な実路走行時のシナリオデータを制作するサービスです。シナリオ化されたデータはOPEN SCENARIO形式及びOPEN DRIVE形式に対応しています。
実写映像再生ソフトウェア True Sim

True Simは360度カメラで撮影した走行映像に対して特徴点などの各種情報を抽出し、撮影時のカメラ視点/角度の映像だけでなく、撮影時とは異なるカメラ視点/角度からの映像に変換して再生することができる映像再生ソフトウェアです。
GPS制御 完全な無人走行 実車走行試験用ロボット「NaviControl」

テストコース内において試験車両を定義された軌跡および速度でハンドルブレーキ/ アクセル/ クラッチ、ギアロボットを使い、かつ高再現性かつ安全に実走行試験をするRTK-GPS 制御のロボットです。
非接触式視線計測システム 「Smart Eye Pro DX システム」

リアルタイム画像解析ソフトウェアによって、小型高解像度カメラの被験者映像から被験者の頭部運動や視線を計測するシステムです。実車走行時の明るさの変化が大きい環境でも安定した計測が可能です。
ドライバ刺激・運転行動計測システム
imc社製データロガーを用いて車両のCAN信号やアナログ信号を、視線計測システムSmartEyeを用いて視線方向や頭部運動を計測することでドライバの運転行動全般を計測します。さらにLEDやスピーカ、モニタなどを用いて、ドライバに刺激を与えることで、その際のドライバの反応を計測することができます。