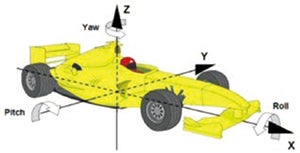
GPS制御 実車走行試験用ロボット NaviControl


NaviControlはテストコース内において各種自動車を定義された軌跡および速度でハンドルブレーキ/ アクセル/ クラッチ、ギアロボットを使い、かつ高再現性かつ安全に実走行試験をするRTK-GPS 制御のロボットです。
各ロボットは脱着可能で簡単に各種自動車に取り付けられます。NaviControl はRTK-GPS を装備することで極めて高精度かつ再現性の高い走行を実現します。完全な無人走行が可能で、悪路長時間/ 急ブレーキ/ 衝突/ 横転/ ポッドテスト(穴落ち)等を ドライバーを危険にさらすことなく行えます。
特長
高精度・高再現性

高再現性でスラローム走行等の試験
1 秒間に50 回のトラッキング制御を行うことで
位置制御精度 :5cm( 直線時)、20cm(カーブ部)
速度制御精度 : ± 0.5km/h
を 実現しています。
※車速、コースの路面状態による
各ロボットの取付けが簡単

簡単に各種車両に装着可能
ロボット取付時間:約1.5 時間(参考値)
各ロボットの取付時間を含めたセットアップ時間は重要です。すべてのロボットは小型・軽量でねじ締めにより簡単に取り付けられます。
特にステアリングロボットは約6kg と軽量化に成功しました。装着時間はすべてのセットアップを含めても約2 時間程度です。
車載側のシステムの堅牢さ
当然ですがこのシステムは 急ブレーキ/ 衝突/ 横転/ 凸凹衝撃試験のような過酷な試験を想定しており。とても堅牢に設計されています。インパクトで100G、連続で5G 以下と高耐久G 性能を兼ね備えています。

無人でのポッドテスト

衝突試験に耐えうる堅牢さ
インパクト耐衝撃:100G 、連続耐振動:5G
種々の自動車でのハードやソフトウェア特注に柔軟に対応
この製品の製造元のイタリアHI-TEC 社はシステムインテグレータ会社です。自動車ごとに異なるギアシフトの特注冶具や大型車・バス・建機・フォークリフト等の特殊な形状のハンドル等に特注対応できます。またソフトウェアに関しても画面表示や特別なシーケンスのソフト特注にも対応可能です。

車両に取り付けられた各ロボット

ステアリングロボット

ギアロボット

アクセルロボット
ブレーキロボット
クラッチロボット
- アクセルロボットは安全上の理由で緊急停止時ガススプリングでアクセルを戻す機能有。
- ブレーキロボットは2 シリンダでモータコントロールおよび緊急ブレーキ用エア方式
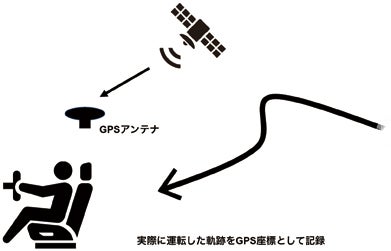
NaviControl の基本概念(2ヶ所でのGPS アンテナ使用)
この製品は干渉測位方式と呼ばれるRTK-GPS(Real Time Kinematic GPS)とIMU(慣性計測ユニット:3 軸ジャイロ+ 3軸加速度計)を使用し、車を動かしたい軌跡で速度制御をしながら完全無人自動走行できるものです。
RTK-GPS 方式の為、試験車両(移動局)と地上に設置した基地局(固定局)の2 か所のGPS 受信アンテナで、受信機から衛星までの正確な距離を搬送波数と位相差から検出されます。
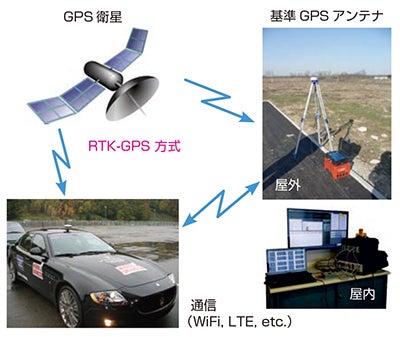
※ Wi-Fi 周波数帯は2.4GHz または4.9GHz(要登録)選択可
システム構成
車両・基地局の構成
自動車側の構成
自動車側基本構成
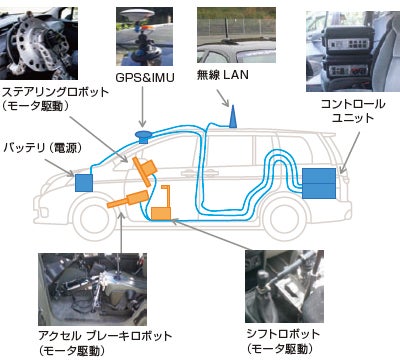
※電源はバッテリより供給
基地局側の構成
基地局側基本構成
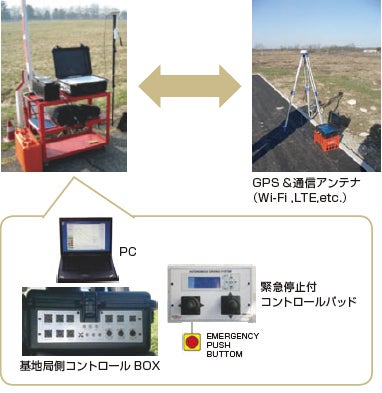
基地局側でも緊急停止が可能
GPS 状態のあまり良くないテストコースでも対応可能 (オプション)
障害物(森林や構造物)やトンネルで一時的にGPS 信号が途絶えても慣性計測装置で自動運転しGPS 信号復帰後通常自動運転ができるシステムにも対応できます。
3 軸で車両の状態を検知しGPS 信号無しの部分を自走させます。
アプリケーション

- 操安/ 乗り心地テスト
- 高速耐久 / 各種路面での耐久試験
- 凸凹衝撃試験
- 急ブレーキ試験
- 衝突試験
- J ターン、フィッシュフック等の規格試験
- 穴落ち試験(POD テスト)
- うねり走行
- 波状路走行
- 縁石乗り上げ
- 砂利道走行
- 崖落ち試験
- 長距離走行
- 急ブレーキ・急ハンドル
- 種々の路面入力における長時間周回走行
(複数台数可能:マルチカーシステム)
FAQ
ソフトウェア
NaviControl Software は、加減速プロファイルを持ったトラック(軌道) を作成できます。トラック(軌道)の設定時にであらかじめ定義された設定を挿入ができます。
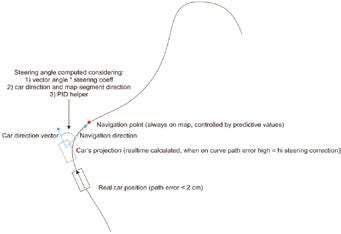
基地局は全てのナビゲーションデータ及び診断システムをモニタします。ナビゲーションデータ(位置、速度、車首方向)がベースステーションにログされます。コントロールユニットにインストールされたNaviEmbed Software は、車両のステアリングをリアルタイムに補正し、設定軌道に対する誤差が直線上5cm 以下およびカーブ約20cm 以下になるよう制御します(車両の動的挙動による)。
ブレーキロボットは、変位または力制御で駆動することができます。
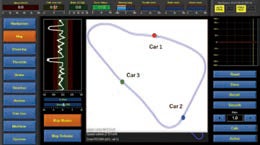
マップとナビゲーション画面

各ロボットの動きを設定するNaviEmbedソフトウェア
軌道の作成(マッピング)方法
方法1.実際に走行させその軌道を記憶
方法2.PC で演算や補間をさせて作成
例:下記のように中心点、半径を設定しPC で描けます。
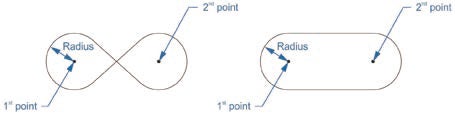
8 の字演算 / オーバル演算
上記方法で作成したデータを一部分のみ編集可能
その後 座標ベースで速度を定義します。
複数台でコースを走行できる
マルチカーパッケージ テストコースを高効率で運用する際、‘ 複数車両で同時走行可能な機能’ にも対応可能です。特にサーキット内で耐久試験・高速走行試験を複数台同時に行うことで大幅な試験効率向上とコスト削減に貢献します。

ロボットの特長&仕様
ロボットの特長&仕様 ステアリングロボット
■ 最も汎用的なモデル DR66PS50 型
- モータ種類 :ステッピングモータ
- 許容トルク :8Nm
- 最大トルク :20Nm(38rpm 時)
- 最高回転数 :60rpm
- 重量 :約6kg( 治具等含む)
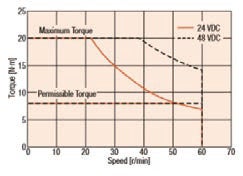
駆動モータ特性カーブ
ブレーキ・アクセル・ギアロボットの標準モデル
| ブレーキロボット - BR66P8 | |
|---|---|
| 最大荷重 | 800 N |
| 最大スピード | 400 mm/s |
| 可動ストローク | 50 - 150 mm |
| モータタイプ | ステッピング |
緊急停止用空気圧アクチュエータ付
※ 400N モデルBR66P4 有
| アクセル・クラッチロボット - AR46P4 | |
|---|---|
| 最大荷重 | 450 N |
| 最大スピード | 250 mm/s |
| 可動ストローク | 50 - 150 mm |
| モータタイプ | ステッピング |
| ギアロボット - AR46P25 | |
|---|---|
| 最大荷重 | 720 N |
| 最大スピード | 150 mm/s |
| 可動ストローク | 50 - 150 mm |
| モータタイプ | ステッピング |
※車種に合わせて特注可能

アクセルロボット

ギアロボット モータおよびエアのダブルシリンダ
(踏力 400N または800N モデルあり)
ステアリングロボット ラインナップ
| ステッピングモータシリーズ(GPS 制御自動運転ロボット用) | ダイレクトドライブシリーズ(主にステアリングロボットシステム用) | |||||
|---|---|---|---|---|---|---|
| DR66PS50 | DR66H100 | DR98PS10 | DR93DD70 | DR140DD50 | DR210DD30 | |
| 圧着グリップ | お薦めしません | お薦めしません | 可 | 可 | 可 | 可 |
| 軽量グリップ | 推奨 | 推奨 | 可 | 可 | 可 | 不可 |
| モータタイプ | ARM66AK-PS50 | ARM66AK-H100 | ARM98AK-PS10 | TECHNAI MK-CI 93-70 |
TECHNAI MK-CI 140-50 |
TECHNAI MK-CI 210-30 |
| 最大トルク [Nm] | 20 @ 38 rpm | 28 @ 25 rpm | 35 | 30 @ 350 rpm | 63 @ 350 rpm | 97 @ 200 rpm |
| 連続トルク [Nm] | 8 | 8 | 20 @ 200 rpm | 16.5 @ 350 rpm | 33.2 @ 350 rpm | 45 @ 300 rpm |
| ストールトルク [Nm] | 8 | 8 | 20 | 5.6 | 11.1 | 16.8 |
| 最高回転数 [rpm] | 60 | 30 | 200 | 350 | 350 | 200 |
| モータ重量 [kg] | 7 | 7 | 9 | 8 | 11 | 19.2 |
| 電源 | コントロールユニットより供給 DC/DC コンバータ |
コントロールユニットより供給 DC/DC コンバータ |
コントロールユニットより供給 DC/DC コンバータ |
外付け電源 | 外付け電源 | 外付け電源 |
DR66PS50  DR98PS10 |
 DR140DD50  DR210DD30 |
|||||
| 中空型ダイレクトモタシリーズ(ステアリングシステム用) | ||
|---|---|---|
| DR260B10 | DR175B15 | |
| オンステアリンググリップ | リムーバブル | ライトグリッパ |
| エアバック開閉用中空半径 | 195 | 93 |
| 取り付け方法 | フロントウィンドウへ空気圧着カップ(1 または2)で取付 | 運転シートから柱でささえる。 ※ DR66PS50 の写真と同様 |
| モータタイプ | TECHNAI MK-CS 260-10 |
MK-CS 175-15 |
| 最大トルク [Nm] | 88 @ 180 rpm | 30 @ 20 rpm |
| 連続トルク [Nm] | 41 @ 350 rpm | 8.3 |
| ストールトルク [Nm] | 10 | 8.3 |
| 最高回転数 [rpm] | 600 | 280 |
| モータ重量 [kg] | 10.5 | 7.5 |
| 電源 | バックアップ用バッテリ付 外付け電源(48V) | バックアップ用バッテリ付 外付け電源(48V) |
 R260B10 |
 DR175B15 |
|
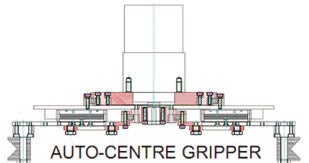
■ 圧着グリップ:
図の様に1 箇所のねじ調整でステアリング外側より圧着固定。中心がとりやすいというメリットがあります。
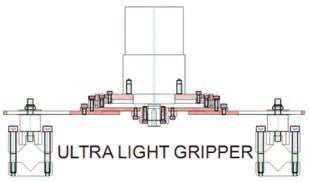
■ 軽量グリップ:
軽量化に徹したステアリング外側を3 箇所ねじ止め。衝撃試験等で脱落の危険がありません。
車載コントロールユニット
コントロールユニット
助手席などに設置するコントロールユニットは、各ロボットを制御します。リモートコントローラを使用することで、軌道に車を移動、システムステータスを確認、簡単なシステムセットアップを行うことができます。
さらにコントロールユニットには、GPS アンテナ、IMU(慣性測定ユニット)、車載カメラとWi-Fi 機器が接続されます。耐久性等の過酷なテストのために耐振動性の高いのペリカンケースを使用しています。

NaviControl Control ユニット:
マニュアルギアロボット付モデル(ロボット接続側)

NaviControl Control ユニット:
マニュアルギアロボット付モデル(データロガー& CAN バス接続側)

リモートコントローラ

GPS アンテナ
3 軸加速度・3 軸ジャイロセンサ(IMU センサ)
| 一般仕様 | |
|---|---|
| 軌道再現精度 | ± 5 cm |
| 速度コントロール精度 | ± 0.5 km/h |
| 電源( 車のバッテリ使用) | 12 VDC |
| 設置時間 | ※ 1.5 時間 |
| 動作温度 | -5 - +55℃ |
| 耐衝撃( 各軸) | 100 G |
自動運転のアルゴリズム
本システムではGPS 信号からリアルタイムで車の位置情報を取得しており現在の車の位置からマップ上の目標地点までの方向、距離を計算し、ステアリングを切る角度を常時調整しています。調整周期は20Hz – 50Hz です。(GPS レシーバの種類によります。)
安全性(緊急停止ブレーキ等)について
様々なトラブルによる自動車の暴走、衝突は避けるべき重大事項です。
軌跡の逸脱(距離設定可)、システム電源喪失やGPS 信号の一定時間以上の遮断、車両- 基地局間の通信遮断等の様々な想定に基づき安全機能が働きます。
■ システムは車両状態を監視し、下記条件により緊急停止ブレーキが実行されます
- 条件1 :エアタンクユニット空気圧監視
- 条件2 :マイコン監視
- 条件3 :制御ソフトウェア監視
- 条件4 : GPS モード監視
- 条件5 :パスエラー監視
- 条件6 :アクチュエータ監視
- 条件7 :前方衝突センサ監視(オプション)
- 条件8 :電源喪失
- 条件9 :外部緊急停止釦(車載側)
- 条件10 :外部緊急停止釦(基地局側)
■ 緊急停止ブレーキ時のシステム挙動
- ブレーキロボット(電動アクチュエータ)駆動
- ブレーキロボット(エアアクチュエータ)駆動
- アクセルロボット電源供給オフ
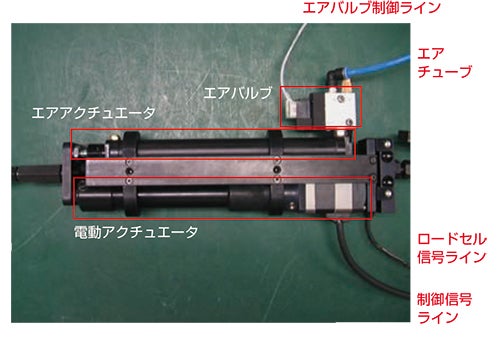
ブレーキロボットは2 種類のアクチュエータで構成されています。制御用の電動アクチュエータと緊急停止ブレーキ用のエアアクチュエータです。緊急停止ブレーキの際には両方のアクチュエータを駆動させます。
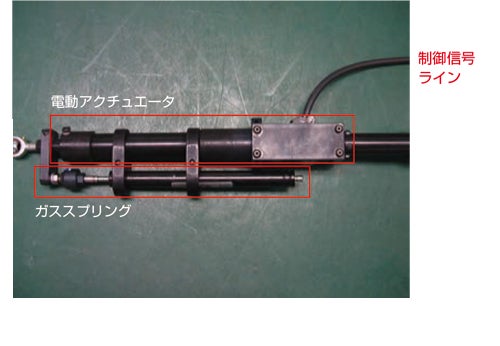
アクセルロボットは1 種類のアクチュエータで構成されています。緊急停止ブレーキ時には電動アクチュエータの電源供給がオフとなり、ガススプリングによりストロークが引き戻されます。
ご発注までの主な流れ
次に、お客様の所有のテストコース、または、日本自動車研究所等の貸出可能なテストコースをスケジューリングしていただき試験車を確保の上、デモンストレーションを行わせていただきます。
ご発注までの主な流れ

●お打ち合わせ
自動運転の種類・パターンの決定
(S 字、定常円旋回、等)
その他内容
(計測パラメータ 等)
↓
●ご要望によりデモンストレーション
スケジュール、デモフィールド確保等
↓
●お見積り
↓
●ご発注
メールでのお問い合わせ デモンストレーション 詳細説明のご要求は
→東陽フォームの資料請求へお電話でのお問い合わせ:
株式会社東陽テクニカ オートモーティブ・ソリューション部 ドライビングロボット担当
03-3279-0771