音響粒子速度センサから始まる 新たな振動/ 音響計測
1. はじめに
最近の車は随分静かになっており、逆にわずかなノイズが気になることがあります。このノイズは振動が主原因で、対策の一つは音や振動の大きい箇所を見つけることです。
一般的にこの計測には、センサとしてマイクロホンを用います。ところが車室内のような音が反射する音場における音(振動)源特定のための測定は難しいのが現状です。昆虫には、空気の振動を検知する触覚があります。この難しい音源探査は、触覚を持った昆虫が行うと意外と簡単に出来るのかもしれません。音響粒子速度センサは、この空気の振動を我々が値として計測することができる電圧に変換するセンサです。
2. 音(振動)源の特性
音の発生メカニズムと、空気中を音がどの様に伝わっていくかイメージするために、音の伝達物質(媒質)である空気が満たされている管を考えます。左に空気を振動させるピストンがあり、左右に連続して動いているとイメージしてください。この動作により空気を圧縮、膨張させます。その結果、空気粒子が密な部分と粗の部分が現れます(図1)。
ここでいう空気粒子とは、酸素、二酸化炭素、窒素などの空気を構成する分子よりもサイズは大きく仮想的なものです。この粗密波は、媒質中を左から右へ伝わっていきます。我々は、耳でこの粗密波による微小な圧力変化を音として感じています。粗密波は管の中を左から右に音速で伝播していきます。
図1では、空気粒子を黒い点で表しています。そのうちのいくつかを赤い点で示しています。空気粒子は密から粗の部分へ移動します。粗密の度合いにより変化する圧力がマイクロホンで計測される音圧です。図1中央上部の赤い点は、青い両矢印で示した幅で左右に振動するだけで左から右へ移動はしません。この振動速度が音響粒子速度センサで計測される音響粒子速度です。振動現象により音圧(位置エネルギー)と音響粒子速度(運動エネルギー)が発生することがお分かりいただけるかと思います。
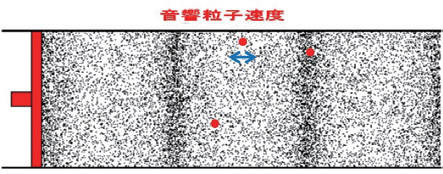
図1: 音源(ピストン)と管内における音圧(粗密)と空気粒子(赤い点)
一般に音響計測は、マイクロホンを用いた音圧計測がほとんどです。音響粒子速度計測は考慮されていないのが現状です。しかし、音圧だけでなく音響粒子速度センサを用いた計測、あるいはそれらを組み合わせた計測を行うことで音響現象の解析方法が今までと大きく変わっていきます。音源(ピストン)近傍における音圧と音響粒子速度の振る舞いについて見ていきたいと思います。
ピストンが動くと、ピストン表面の空気粒子が動き出して粒子速度が発生します。ピストン表面極近傍では空気の層がほとんど圧縮されない領域があります。この領域ではあたかも慣性をもったマスであるかのような振る舞いをします。空気の持つ慣性的な要素と弾性的な要素を較べたとき、より慣性的な性質をもつ領域です。このような特性を示す音場を、far field、near fieldと対比させてvery near fieldと呼んでいます。
次に非常に小さなピストンを閉ざされた筒の中ではなく、開空間に持ち出した状況を考えてみます。音はピストンを中心に球形に広がっていきます。この場合ピストン(音源)からの距離(r)に応じて、 near field やfar fieldといった音場の区別があることはよく知られています。far field では、音源からの距離が2倍になると音圧、粒子速度共にレベルが1/2になります(図2)。
音圧(p)と粒子速度(u)の比率を示すパラメータに、特性インピーダンス(p/u)があります。特性インピーダンスは音の伝わり難さを示します。
インピーダンスが低い →低い音圧(振動)で大量の空気が動く
インピーダンスが高い →高い音圧でも少量の空気しか動かない
ということになります。
far fieldでの空気の特性インピーダンスは、ρ0cですが、near fieldでは図2のようにρ0cのファクタに係数がかかり小さくなります。このため音響粒子速度が音圧に較べて相対的に高い領域となります。
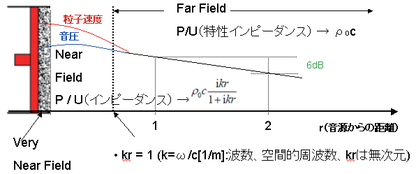
図2:音源近傍における音圧と音響粒子速度
一般的に鉄板やガラス等の堅い面では、特性インピーダンスが高くなります。その近傍で計測する場合、入射波による音圧はその面で反射し計測される音圧レベルは高くなります。入射波による音響粒子速度は、入射波と反射波により相殺されるため低くなります。このため、特性インピーダンスの高い面から発する音の測定は、入射波の影響を受け難い粒子速度を計測するほうが効果的です(図3)。
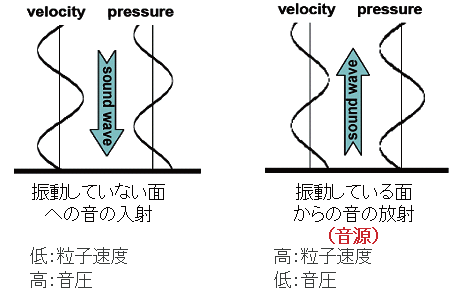
図3: 音源近傍における音圧と音響粒子速度(振動面と反射面の違い)
次に音源近傍における音圧と粒子速度が、どのような位相関係になるか説明をします。バネ-マス系における力(加速度)とマスの速度(時間積分)の位相関係。または、電気回路系におけるコイルに加えた電圧とそのときに流れる電流の位相。という対比で考えるとイメージしやすくなります。音圧を力と考えます。力が空気粒子に加わると、空気粒子に加速度が発生します。このとき、空気粒子の速度は加速度より90°遅れます。速度は加速度を時間積分し、蓄積されたものだからです。また、加えられた力により圧力の勾配が発生します。これにより発生した空気粒子の粗密をうち消す様に空気粒子が移動します。その際のタイミングは音圧勾配発生に較べて若干遅れる、と考えてもいいと思います。Microflown音響粒子速度プローブが計測する物理量は速度です。very near fieldでは音圧の変化に対して90°遅れた位相として観察することができます。
near field では、10~80°、far fieldでは、0~10°の位相差が音圧と粒子速度にあります。
3. 音響粒子速度センサとは
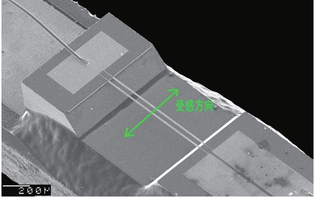
図4: Microflownプローブ受感部のSEM(scanning electron microscope)画像
2001 年にオランダのMicroflown Technologies 社で音響粒子速度センサ(Microflownプローブ)が製品化されました。1mm×2mmほどのチップに2 本の極めて細い白金(Pt)線が形成されています。(図4)2本の白金線は平行に配置され、電流を流して約200℃に熱せられます。
この白金線の近くを空気粒子が通過するときに、白金線から熱を奪います。その熱を持った空気粒子が二本目の白金線からも熱を奪います。しかし、2本目の白金線から奪う熱量が1本目の白金線から奪う熱量より小さくなります。このため、2本の白金線には温度差が生じます(図5)。
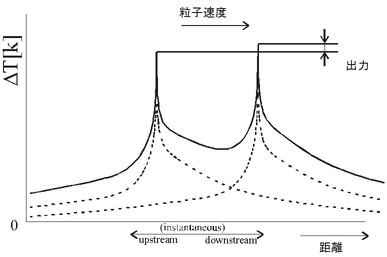
図5:2本の白金線近傍の温度分布
白金線の温度変化により、その抵抗値が変化します。この抵抗変化量が通過する粒子速度に比例します。
この基本原理は熱線流速計と同じものです。それもそのはずで、この音響粒子速度センサは、熱線流速計を使用して、なかなか思うように進まない実験中に、熱線流速計が自分の声に反応したように見えたことにヒントを得て開発に至ったものだからです。
Microflownセンサは極小で2本の白金線を用いているため、それらの温度差から極性出力がもたらされ音の方向も測定出来ます。また、MEMS製造技術を用いて非常に小さく作られており、可聴周波数帯域の音に良く反応する点においても熱線流速計とは異なります。
この音響粒子速度センサには、図6のような8の字の指向性があります。空気粒子が2本の白金線を図4の受感方向に通過する場合に2本の白金線の温度差が最大となり、感度が最大となります。この方向と直交する全ての方向から入射する粒子速度に対しては、2本の白金線が同じタイミングで同じだけ冷やされます。このときは2本の白金線には温度差が生じず、センサ出力がゼロとなります。この様な指向性があるため、測定面近傍で計測する場合、その測定面に入射してくる音の影響がマイクロホンと比較して非常に小さくなります。


図6:MicroflownPUプローブ-音響粒子速度センサ部の8の字指向性
通常の会話の音圧レベルは60dB(ref. 20μPa)程度です。far fieldにおいてこの音圧を音響粒子速度のレベルに換算すると60dB(ref. 50nm/s)です。これを音響粒子速度センサの白金線の温度変化に換算すると10m℃程度になります。
この粒子速度によるわずかな温度変化をとらえるため、かつ応答速度を速めるため非常に細い白金線が(髪の毛の1/400倍の細さ)用いられています。また、構造はマイクロホンで用いられるダイアフラムのような可動部分がありません。そのため構造共振が少なく、周波数応答(20Hz~20kHz)特性の向上に寄与しています。
更に2本の白金線の温度差を検出するため、それぞれの白金線に共通となるコモンモードノイズはキャンセルされ、S/Nを向上させています。測定環境に温度や湿度の勾配がある場合でも、センサ自体が非常に小さいため、その影響を受け難い面も備えています。
4. Scan & Paintシステム
今までご説明した様に、音源および音響粒子速度センサには下記の特性があります。
1. 音源近傍における音響粒子速度レベルの高さ
2. 反射面における入射音に対する音響粒子速度レベルの低さ
3. 音響粒子速度センサが持つ8の字の指向性
これらの特性をコンパクトな音響粒子速度センサ(Microflownプローブ)を用いて最大限活用するため、Scan & Paintシステムが開発されました。
測定対象物表面を音圧センサと音響粒子速度センサを備えたMicroflown PUプローブを用いてスキャンします。同時に測定状況の動画を収録します。次に画像処理により、プローブ位置をフレーム毎に認識します。計測された音圧と音響粒子速度値は各フレームと同期しています。これらの位置にその時に測定された値を一枚の画像に当てはめることで、短時間に音圧・音響粒子速度・音響インテンシティマッピングが得られるシステムとなっています。
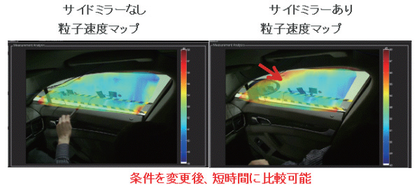
図7:風洞内における自動車の比較試験
5. 今後の展望
音響粒子速度センサを用いることにより音源と受音点、またそれらの近傍における境界条件としての特性インピーダンス測定がますます容易になってきています。2つほど最近のトピックをあげたいと思います。
---伝達経路解析(Transfer Path Analysis、TPA)への応用について---
伝達経路解析にも音響粒子速度センサは適用が可能です。そのメリットは音源および伝達経路測定時、8の字の指向性により反射音の影響を受け難いことにあります。音源が定常的なものであれば前述したScan & Paintシステムの機能を用いることにより、各音源からの応答点(リスナ耳位置)への寄与度解析は多数のマイクロホンを使用することなく、プローブ一本のコンパクトなシステムで可能になります。
---MPP(微細穿孔板吸音材)の音響特性評価について---
従来吸音材はグラスウールなどの多孔質材料が中心でした。これらの材料には衛生や耐久性などの面で問題があります。それに替わるものとしてMPP(microperforatedpanels、微細穿孔板)の開発が盛んになっています。1mm 程度の直径の孔を多数もち、孔の縁における粘性摩擦により音のエネルギーを減少させる機構をもつ吸音材です。MPPは金属やプラスティックの様な材料が用いられ、再利用可能、清潔、繊維不使用、不燃、堅牢、軽量など環境にやさしい特徴をもっています。 最近は、円形孔の代わりにスリット形状の孔をあけた低コストタイプのものも開発されています。この様な新しい材料に対して音響粒子速度センサを用いることにより、サンプル表面近傍において空気が孔の縁で背後空気層をバネとする復元力を受けて激しく出入りし、音響粒子速度が上がる様子を観察することができます。
今まではセンサや音響管サイズ、あるいはサンプル切り出しなどの制限により直接観察できなかった現象や、実際の現場における吸音率の測定が音響粒子速度センサにより可能となっています。
材料特性のデータベースに加え、表面インピーダンスデータの蓄積も進んでいます。
今後更なる発展が期待できます。
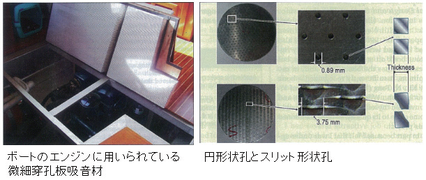
図8:微細穿孔板吸音材の例