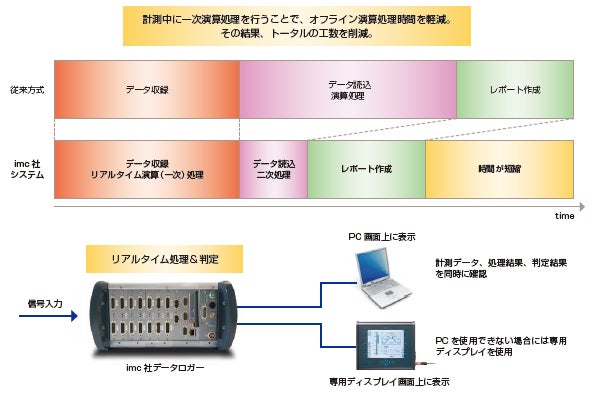
リアルタイム演算処理機能「Online-FAMOS」を用いた試験計測
試験計測によって得られたデータは、オフラインにて各種解析やレポート作成に利用されます。
場合によってはこのオフライン業務の量が膨大となり、多くの時間を費やすこともあります。
そのため、オフライン業務を軽減するべく、試験計測実施中に一次解析処理を行うことが要求されます。
また、オフライン解析を行った結果、再試験が必要と判断される場合もありますが、再度試験セットアップを行い試験を実施すると大幅に時間を失うことになります。
そこで、試験のOK/NGをリアルタイムに判定できるシステムが要求されます。
imc社のデータロガーは内蔵されたDSP(Digital Signal Processor) を用いて、計測中にリアルタイム演算を行うことができます(PCの能力を使わずに処理が可能)。このリアルタイム演算機能を利用し、試験計測中の一次解析 処理やOK/NG判定を行うことで、お客様のオフライン作業の軽減と、再試験の無駄を省くことができます。
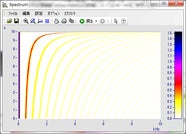
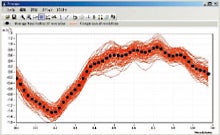
リアルタイムFFT
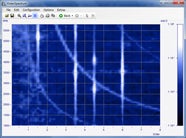
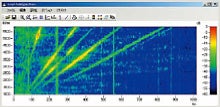
リアルタイムオーダートラキング
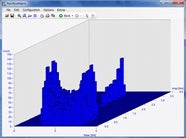
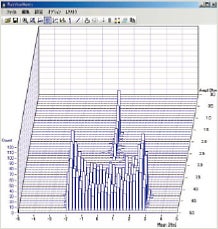
リアルタイム頻度処理
imc社のデータロガーが持つリアルタイム演算処理機能「Online-FAMOS」はプログラミングスキルを必要としません。
処理したいチャンネルをリストからマウスでドラッグし、処理関数の上にドロップすると、必要なパラメータを入力するためのアシスタントボックスが出現します。
このアシスタントボックスにパラメータを埋めることで、DSPへの命令構文が作成されます。
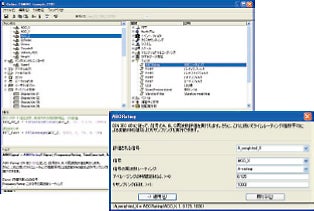
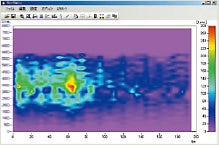
演算処理設定画面
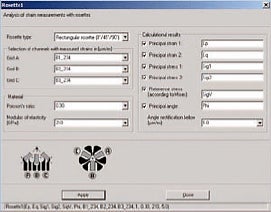
ロゼッタ解析設定画面
■ DSPを用いた制御と計測の例
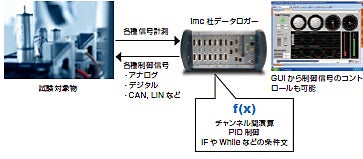
コンポーネント単位の試験においては、計測と同時に試験対象の制御が必要になります。
このような場合、従来は制御機器と計測機器を個別に準備しておりました。しかし、個別に試験設定を行うことの煩雑さや、計測機器から制御機器へのフィードバックができないことなどから、生産的な試験計測が実施できていませんでした。
imc社のデータロガーは内蔵されたDSPを用いて試験対象の制御と計測を1台で同時に行うことができます。
■ DSPを用いた計測診断例
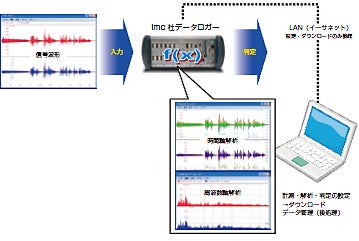
計測診断は、研究開発・試験計測・生産現場・サービ ス業務など多種多様なシーンで要求されます。
これらのシーン毎に要求される計測診断は「センサを使った計測」、計測したデータの信号処理(解析)」、「信号処理結果でのしきい値判定」の流れで行われ ます。 これまで、多くの計測診断技術では、これらの診断を実現するためにパソコンを用いていました。
しかし、imc社のデータロガーは、内蔵されたDSPにより、パソコン無しで計測、解析、判定を行うことができます。
自動スタートモードを用いることで、システムは電源の投入と同時に自動的に計測開始し、判定結果を出力することが可能です。
リアルタイム信号処理機能「Online-FAMOS」が提供する関数
リアルタイム演算処理は以下に記載する関数を用いて実施します。これらの関数を組み合わせることで、様々なリアルタイム処理に対応することができます。
| 関数グループ | 概要または詳細な関数紹介 |
|---|---|
| 基本計算 | 絶対値(Abs)、特性曲 線補正処理(Charact)、デシベル変換(dB)、微分(Diff)、小数点以下を切捨てた整数値の取得(Floor)、積分(Integral)、 条件によるリセット機能付き積分(Integral 2)、高精度積分(Integral P)、条件によるリセット機能付高精度積分(Integral P2)、自然対数(Ln)、間引き(Red)、最も近い整数値の取得(Round)、平方根(Sqrt)、シュミットトリガ(STri) |
| 比較計算 (コンパレータ) |
指定範囲内での応答値 (CodeRange)、等しい(Equal)、より大きい(Greater)、等しいか大きい(GreaterEqual)、より小さい(Less)、 等しいか小さい(LessEqual)、2値の小さい値を出力(Lower)、等しくない(UnEqual)、2値の大きい値を出力(Upper) |
| イベント/フィルタ | 時間遅延処置 (DelayLine)、デジタルフィルタ処理(DFilt)、ギア比算出(GearRatio)、ヒステリシス(Hyst)、メディアンフィルタ (Median3、Median5)、イベント時のテキスト出力(RecordEvent)、指定条件でのゲートサンプル処理(SampleGate)、 鋸波の生成(Sawtooth)、指定傾きのクリッピング(SlopeClip)、スムージング(Smo3、Smo5) |
| FFT(周波数分析) | FFT分析(FFT:0% オーバーラップ、窓関数設定のみ)、FFT分析(FFTAmplitudePhase:0%オーバーラップ、窓関数設定、振幅/位相結果出力)、FFT分 析(FFTAverage:オーバーラップ0%、50%、75%、90%設定可能、窓関数設定、平均化処理可能)、逆FFT演算 (FFTInverse)、FFT分析(FFTRealImaginary:実部/虚部結果出力)、FFT分析結果の積分処理 (IntegralFFT)、ΔFの修正(Resample) |
| フィルタ | ABC特性フィルタ (ABCRating)、バンドパスフィルタ(FiltBP:ベッセル、チェビシェフ、バターワース、臨界減衰)、バンドストップフィルタ (FiltBS:ベッセル、チェビシェフ、バターワース、臨界減衰)、ハイパスフィルタ(FiltHP: ベッセル、チェビシェフ、バターワース、臨界減衰)、ローパスフィルタ(FiltLP:ベッセル、チェビシェフ、バターワース、臨界減衰)、LEQ値 (LEQ)、音圧レベル(SoundPressureLevel:ABC特性、時定数)走行快適性周波数補正(Vibration Filter : ISO2631-1他、時定数) |
| ロジック | AND(BitAnd)、 OR(BitOr)、JKフリップフロップ(JKFlipFlop)、論理AND(LogAnd)、論理Not(LogNot)、論理 or(LogOr)、論理Xor(LogXor)、モノフロップ(Monoflop)、トリガ設定可能なモノフロップ(MonoflopRT)、RSフ リップフロップ(RSFlipFlop) |
| 北半球補正フリップ | 北半球補正(NorthCorrection)、風向計補正(WindRoseCorr:0~360度での表示変換) |
| 基本演算(2) | −、%、*、/、^、+、割り算の整数値出力(iDiv) |
| 電力計算 | 単相、2相、3相パワー計算(Power1、2、3:瞬時電力、有効電力、無効電力、力率、各信号の実効値) |
| スケーリング | 実数値の仮想チャンネル生 成(CreateVChannel)、整数値の仮想チャンネル生成(CreateVChannelInt)、測定チャンネルの計測時間 (GetDuration)、サンプリング時間の取得(GetSamplingTime)、レンジ上限の設定(RangeMax)、レンジ下限の設定 (RangeMin) |
| 統計処理 | エクスポネンシャル RMS(ExpoRMS)、ハイ/ロー比率の算出(HighLowRatio)、最大値(Max)、最小値(Min)、平均値(Mean)、パルス数のカ ウント(NumberOfPulses)、パルス幅の算出(PulseDuration)、パルス周波数の算出(PulseFrequency)、パルス 位相の算出(PulsePhase)、リニアRMS(RMS)、標準偏差(StDev)、積算(Sum)、条件によるリセット付積算(Sum2) |
| 歪みゲージ計算 | ロゼッタ解析計算(回転応力計算) |
| システム関数 | ディスク空き容量(DiskFreeSpace)、ディスク空き時間(DiskFreeTime)、実行ディレクトリ(DiskRunDir)、ディスプレイのページ設定(Display Set Page)、同期クロック受信確認(IsSyncronized) |
| 特殊データ リダクション |
トランジショナルレコーディング(TransRec) |
| 三角関数 | サイン(Sin)、コサイン(Cos)、タンジェント(Tan)、アークサイン(Asin)、アークコサイン(Acos)、アークタンジェント(Atan) |
| ベクトルデータ列処理 (FFT分析結果などのデータ構造をベクトルデータと表現しています。) |
ベクトルファイル読み出し (VectorFromFile)、ベクトルデータ列の生成(VectorizeAndSkip)、ベクトルデータのオーバーラップ処理 (VectorizeOverlapped)、ベクトルデータ列の比較(VIsAnyGreater)、ベクトルデータの最大値(VMax)、ベクトル データ列の最大ベクトル(VMaxV)、ベクトルデータの平均値(VMean)、ベクトルデータ列の平均ベクトル(VMeanV)、ベクトルデータの最小 値(VMin)、ベクトルデータ列の最小ベクトル(VMinV)、ベクトルデータ列の間引き(VRedV)、ベクトルデータの実行値(VRMS)、ベクト ルデータの積算(VSum)、指定X値におけるベクトルデータのY値の取得(VValueAtXValue)、ベクトルデータの最大値となるX値の取得 (VXValueOfMax)、ベクトルデータの最小値となるX値の取得(VXValueOfMin)、指定Y値におけるX値の取得 (VXValueWithYValue) |
| インターバル関数 | 1つレベルを跨ぐ間隔 (IntervalFrom1Level)、2つのレベルを跨ぐ間隔(IntervalFromLevels)、パルスの間隔 (IntervalFromPulse)、取得した間隔での最大値(IntervalMal)、取得した間隔での平均値(IntervalMean)、取 得した間隔での最小値(IntervalMin)、取得した間隔でリサンプル(IntervalResaple)、取得した間隔での RMS(IntervalRMS) |
| テキスト関数 | 2つのテキストの結合(TextAdd)、テキストを浮動小数点に変換(TextFormatE)、テキストを固定小数点に変換(TextFormatF)、テキストを16進数に変換(TextFormatH)、数値をテキストに変換(TextFormatI) |
*上記関数は「Online-FAMOS」の提供する全ての関数ではありません。
*オンライン次数分析およびオンライン頻度処理については以下をご参照ください。
ただし、以下に記載の関数は「Online-FAMOS」の追加オプションとなります。
オンライン次数分析オプション「****/ONORDER」
回転体の評価において回転数に起因する現象の信号処理(回転に追従した分析=トラッキング分析)にご利用いただけます。
| 関数グループ | 概要または詳細な関数紹介 |
|---|---|
| 回転体解析関数 | 回転パルス信号からの 回転数の算出(OtrEncoderPulsesToRpm)、サイン波信号の振幅と位相の算出(OtrFrequLine)、定幅トラッキング処理によ る次数スペクトラムの算出(OtrOrderSpectrum/OtrOrderSpactrumP)、回転パルスからの角度リサンプル処理 (OtrResample)、回転数データからの角度リサンプル処理(OtrResampleFromRms)、次数成分抽出 (OtrRpmComplexOrder:振幅/位相)、デジタルトラッキングフィルタによる次数分析(OtrRpmOrder:振幅のみ)、回転数によ る信号の並べ替え(OtrRpmPresentation)、FFT分析結果からの定幅次数分析(OtrRpmPresentVector)。定幅トラッ キング処理(OtrRpmSpectrum)、デジタルトラッキングローパスフィルタ(OtrTrackingLowPass) |
オンライン頻度処理オプション「****/ONKLASS」
耐久・信頼性試験などで求められるレインフロー法による頻度処理や、回転累積頻度処理などを計測しながら、信号処理いただけます。
| 関数グループ | 概要または詳細な関数紹介 |
|---|---|
| 頻度処理関数 | 確率密度/ヒストグラ ム(ClHistogram)、レベルクロスカウントヒストグラム(ClLevelCrossing)、マルコフカウント頻度処理(ClMarkov)、 レインフロー法頻度処理(ClRainFlow:全振幅=1にてカウント)、レインフロー法頻度処理の片振幅値の取得(ClRainFlowRes)、真 の極値リサンプル手法によるレインフロー法(ClRainFlowTM)、真の極値リサンプル手法による頻度処理の片振幅値の取得 (ClRainFlowResTM)、レンジペアカウント頻度処理(ClRangePairCount)、回転累積頻度 (ClRevolutionHistogram:トルク分布のみ)、回転累積頻度(ClRevolutionMatrix:トルク−回転数の分布)、真の 極値リサンプル(ClTrueMax)、2チャンネル相関確率密度/ヒストグラム(ClTwoChannelHistogram) |