![]()
様々な環境下の実路走行を
ラボ内シミュレーションで再現する
先進エコシステム
DMTS
Driving & Motion Test System

近年の車両システムの高度化・複雑化による車両試験の課題を解決。
当社の自動車開発試験における豊富な経験をもとに、MBD(モデルベース開発)をXILSで実現する統合コントローラシステム「DMTS」(Driving & Motion Test System)を開発いたしました。
近年の車両開発では、車両システムの高度化・複雑化により車両試験における負荷が高くなってきています。
そういったお客様の課題を受け、ラボ内で様々な環境下での実路走行をシミュレーションし、また、当社の様々な自動車計測ソリューションと組み合わせることで、AD/ADAS開発だけでなく、VILSによる車両全体の試験を実現することが可能になります。
DMTSの3つの特徴
XILSを実現する
統合コントローラ
様々なシミュレータや試験コンポーネントと連携した試験を可能にするエコシステム
AD/ADAS機能評価の
シナリオ条件を幅広く再現
自動ブレーキ、走行レーン逸脱防止などAD/ADAS機能の開発に欠かせない評価項目を幅広く実施可能
お客様の情報資産
(試験データ)を有効活用
代表的な車両解析ソフトウェアで作成した車両モデル、試験データをDMTS上で実施可能
XILSを実現する統合コントローラ
DMTSは「Road to Lab(フィールドで行われている実車試験を実験室で)」と実現するトータルソリューションです。
レーダシミュレータ、カメラシミュレータをはじめとした各種シミュレータ、エミュレータ、あるいは他の試験コンポーネントを連携して動作させ、自動運転やトルクベクタリングなど高度化された車両システムを検証することが可能なエコシステムです。
AD/ADAS機能評価のシナリオ条件を幅広く再現
AD/ADAS開発において欠かせない以下のような機能を評価することが可能です。
- 自動ブレーキ機能
- 走行レーン逸脱防止機能
- 前走車追従
- 自動パーキング

お客様の情報資産(試験データ)を有効活用
CarSim、CarMakerなどの車両解析ソフトウェアで作成したモデルやシナリオをDMTS上に読み込み、VILS試験として活用できます。
新たにシナリオやモデルを作成する必要がなく、開発サイクルにおいて一貫したテストシナリオを効率的に実施することが可能です。

DMTS for ADAS-VILS
DMTSはMILS/SILS/HILSで作成した車両や道路モデル・シナリオを車両を使ったVILSに活用することができます。実験室内の台上で様々な試験を実施することにより、天候や交通流の影響を受けず、短期間でハイリスクな条件を評価することができます。
活用事例(アプリケーション)
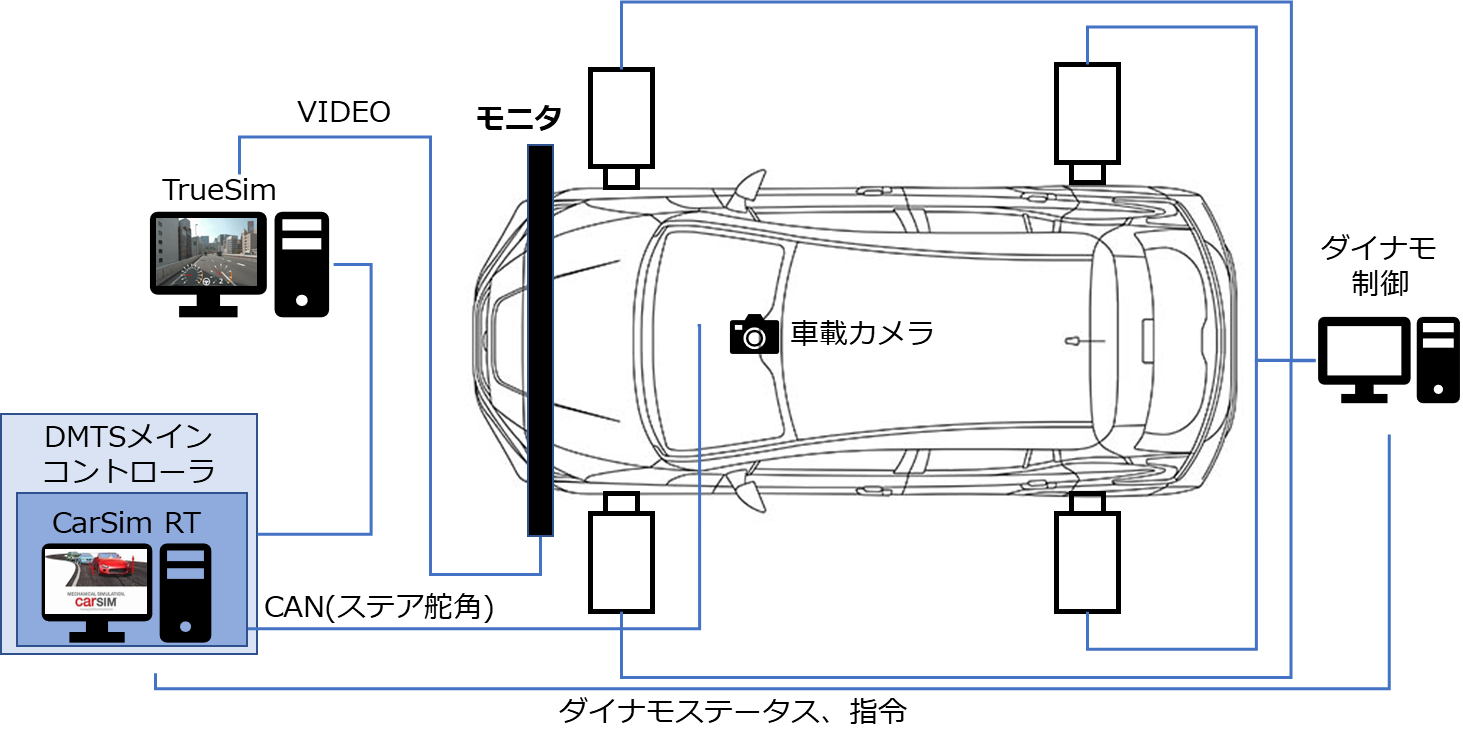
事例 ― 1 ADAS機能の再現試験
ADAS機能を台上にて評価する例です。
車両運動シミュレータを使用してシャシダイナモと連携して動作するVILS構成です。
AEB(Autonomous Emergency Braking)、LDW(Lane Departure Warning)の機能検証のために、単眼カメラシステムの車両を使用しています。
車載カメラ前に大型モニタを配置しています。
車両運動シミュレータで作成したシナリオに沿ってモニタ上に、道路、他車両あるいは交通参加者を投影します。
車載の単眼カメラにてモニタを映し、AEBやLDWが機能するかを評価します。
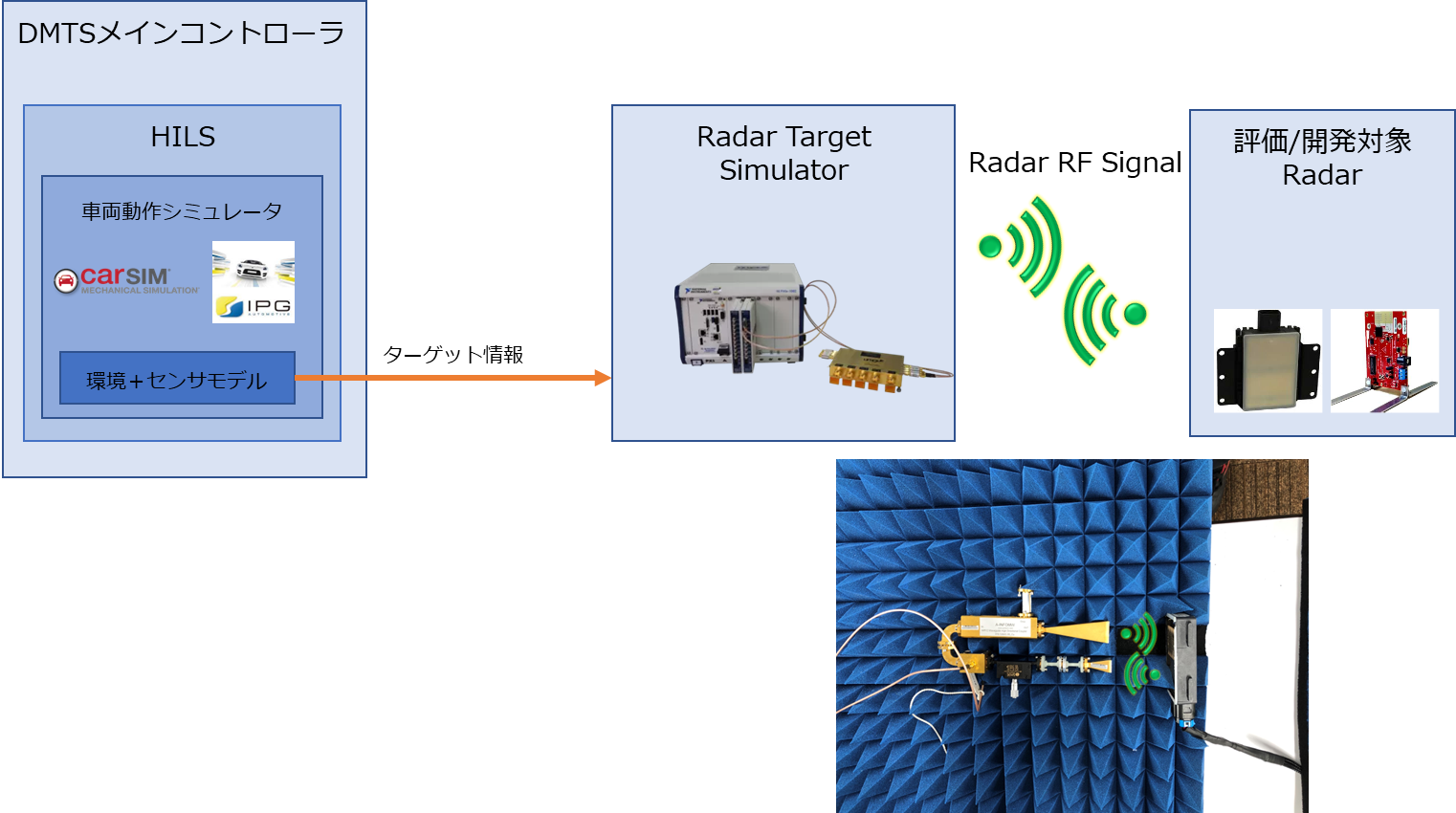
事例 ― 2 Radar HILS
Radar Target Simulatorを使用したRadar HILSの構築例です。
CarSimやCarMakerなどの環境シミュレータで、シナリオを作成し、Radar Target Simulatorと連携して動作します。
ターゲットリスト(複数の反射物体のそれぞれの相対位置座標、相対速度、反射断面積:RCS)情報をやり取りし、レーダー信号をリアルタイムで発生させて、あたかも実際に道路を走行しているようにミリ波レーダーセンサーに対して刺激を与えることができます。
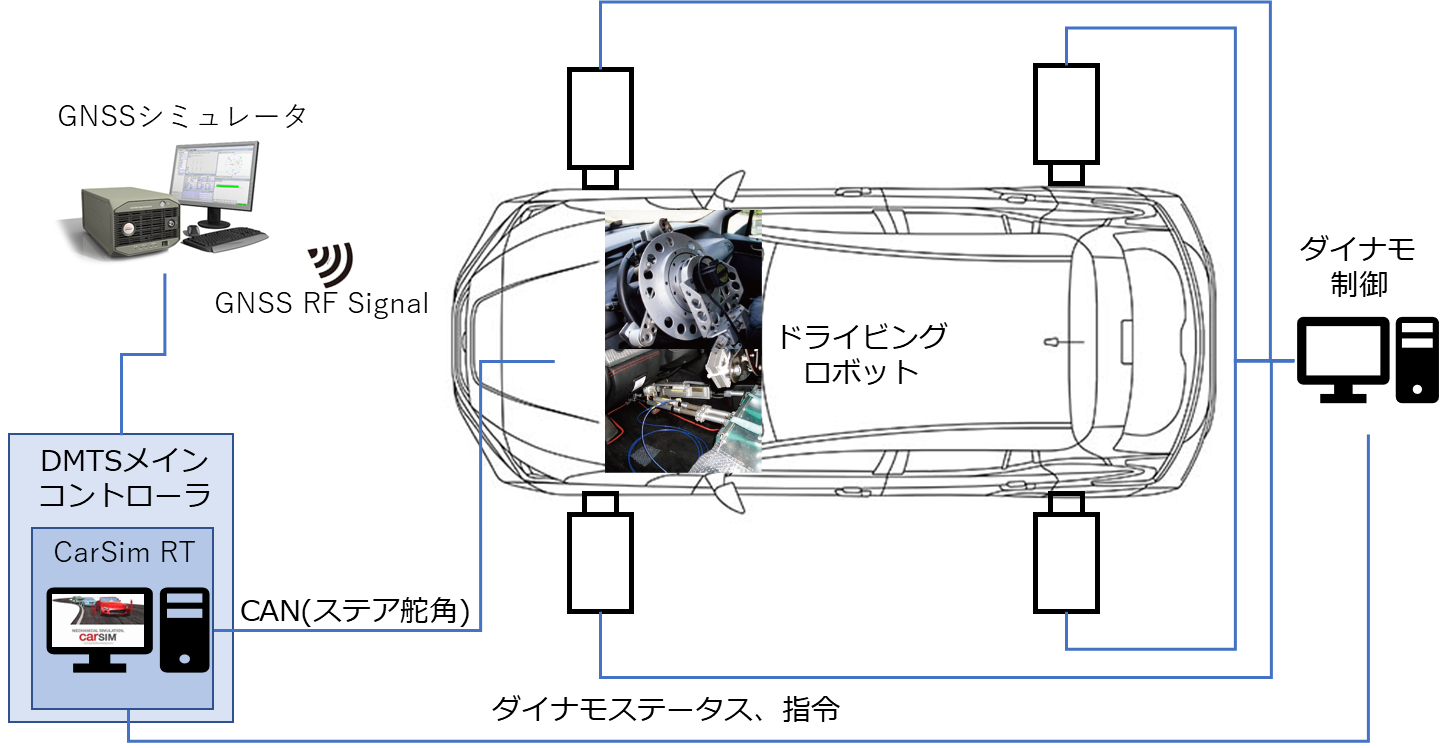
事例 ― 3 自動運転車両試験
CarSimなどを使用してシャシダイナモと連携して動作するVILSです。
ここでは、自動運転アルゴリズムの載った車両ではなく、車両操舵にドライビングロボットを使った例です。
車両運動シミュレータとシャシダイナモにて自車両の運動を再現します。
ドライビングロボットの操縦プロファイルに従って車両を操縦させます。
自車位置を車両運動シミュレータからGNSS Simulatorに送信し、GNSS Simulatorから、RF信号を車両(ドライビングロボット)に送信するループを構成しています。
車両運動シミュレータにより、外乱(例えば突風など)を入力することで、経路に対する追従などの機能を確認することができます。
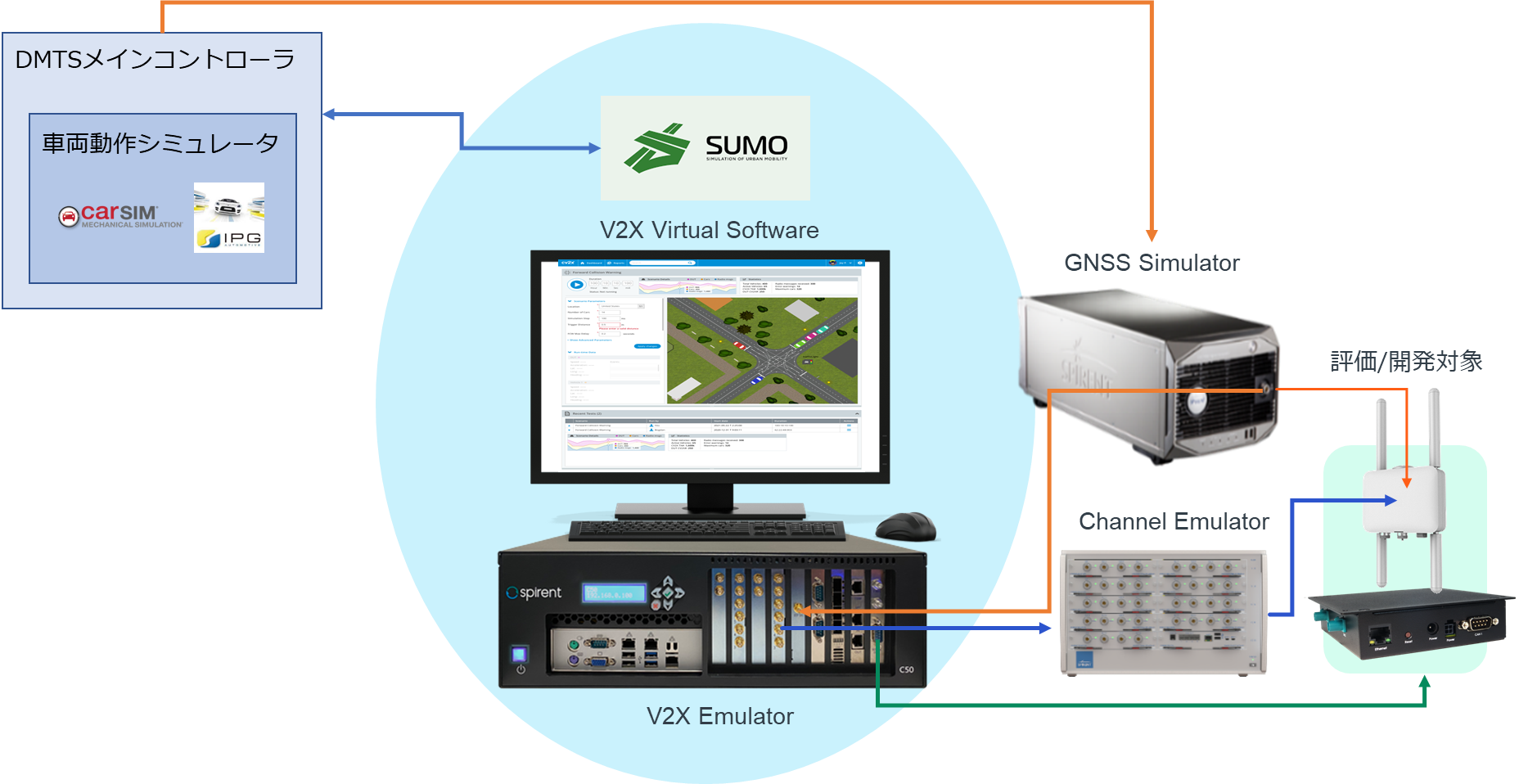
事例 ― 4 V2X通信試験
V2Xデバイス(OBU(On-Board-Unit)およびRSU(Road-Side-Unit))の動的挙動を仮想環境下でテストすることができます。
自車両には、車両運動シミュレータを、他の交通参加者を含んだシナリオは交通流シミュレータを使用し、より詳細な位置情報を出力します。この情報は、GNSS Simulatorに引き渡され、V2X ECU内にあるGPSレシーバの位置精度に影響する様々なGNSS電波伝搬もシュミレーションすることができます。
またChannel Emulatorを組み入れ、実環境のV2X無線電波伝搬をラボ内で再現できます。