慣性GNSSジャイロ「POS MV」


POS MVは、GNSS(GPS, GLONASS, GALILEO, Beidu, QZSS)を用いた測位・方位計測と慣性センサー(光ファイバージャイロ)を組み合わせたハイブリッド航法によって、高精度な測位・姿勢・方位データの計測を行います。高精度の慣性センサー(光ファイバージャイロ、または高精度MEMSジャイロ)が得た動揺データを、GNSSの測位データで補正する事により、慣性センサーの蓄積誤差を解消しつつGNSSの測位データの誤差も補完していくことで相補的に高精度の測位動揺データを提供します。
また、クローズドループ・タイトカップリング方式により補正計算を行うため、カルマンフィルタの性能も高く、GNSSの欠測時でも高精度な測位データを出力し続けることが可能です。
より高精度なヒーブ計測を可能にする“TrueHeave”、更にPOSPacソフトウェアを用いた電子基準点を利用する後処理キネマティック解析を使用することで、ヒーブ、測位、姿勢計測の精度を最尤推定アルゴリズムによってさらに高めることが可能です。
POS MVは、現在最高レベルの姿勢計測システムで、世界中で150式以上が使用されております。
特長
- GNSSと慣性センサーの併用により長時間安定した高精度測位と動揺データを出力
- GNSS欠測時でも高精度な測位が可能
- 50Hzで測位、姿勢データを出力
- リアルタイム精度データ出力
- 高精度ヒーブ計測“TrueHeave”
- 後処理キネマティック(PPK: Post-Processed Kinematic)をサポート
- 高精度マルチビームに最適
仕様
■精度
| POS MV SurfMaster | POS MV WaveMaster Ⅱ | POS MV OceanMaster | POS MV Elite | ||
|---|---|---|---|---|---|
| 測位(m) | POSPacTM(PPK) | 水平:±(8mm+ 1ppm x ベースライン長) 垂直:±(15mm + 1ppm x ベースライン長) | |||
| POSPacTM(PPP) | 水平:<0.1m 垂直:<0.2m | ||||
| RTK | 水平:±(8mm+ 1ppm x ベースライン長) 垂直:±(15mm + 1ppm x ベースライン長) | ||||
| DGNSS | 0.5 ~ 2.0m | ||||
| ロール、ピッチ | POSPacTM(PPK) | 0.025º | 0.015º | 0.008º | 0.002º |
| POSPacTM(PPP) | <0.03º | <0.02º | <0.01º | <0.003º | |
| RTK | 0.03º | 0.02º | 0.01º | 0.003º | |
| DGNSS/CA | 0.04º | 0.03º | 0.02º | 0.005º | |
| 真方位 | - | 0.06º(ベースライン4m) | 0.015º(ベースライン4m) | 0.01º(ベースライン4m) | 0.008º(ベースライン4m) |
| 0.08º(ベースライン2m) | 0.03º(ベースライン2m) | 0.02º(ベースライン2m) | 0.015º(ベースライン2m) | ||
| ヒープ | TrueHeaveTM | 2 cm もしくは 2 % | |||
| リアルタイム時 | 5 cm もしくは 5 % | ||||
ヒープは cm表記と %表記のいずれか大きいほうを採用します。
■物理的仕様
| POS MV SurfMaster | POS MV WaveMaster Ⅱ | POS MV OceanMaster | POS MV Elite | ||
|---|---|---|---|---|---|
| 寸法(LWH) | IMU | ①標準:158 x 158 x 124 mm | 229 x 315 x 196 mm (標準タイプのみ) |
||
| ②防水:直径 100(ベースプレートは直径 132mm)X 104 mm(SurfMaster は高さ 61mm) | |||||
| PCS | ①ラックマウントタイプ:442 x 356 x 46mm、1U 19 インチラックマウント | 442 x 356 x 46 mm (ラックマウントタイプのみ) |
|||
| ②小型タイプ:167 x 185 x 68 mm | |||||
| アンテナ | 直径 178 x 73 mm | ||||
| 重量 | IMU | ①標準:2.5kg | 4.5kg | ||
| ②防水:2.7kg(SurfMaster は 2.4kg) | |||||
| PCS | ①ラックマウントタイプ:3.9kg | 3.9kg (ラックマウントタイプのみ) |
|||
| ②小型タイプ:2.5kg | |||||
| アンテナ | 0.45 kg | ||||
| 電源 | ①ラックマウントタイプPCS:110/230 VAC、50/ 60Hz、40 W(自動切換) | 120・230VAC, 50・60Hz, 自動切換 |
|||
| ②小型タイプPCS:10~34VDC、35 W(ピーク) | |||||
| 動作温度範囲 | IMU | - 20℃~+ 55℃ | - 55℃~+ 85 ℃ | ||
| PCS | ①ラックマウントタイプ:- 20℃~+ 70℃ | - 20℃~+ 70℃ | |||
| ②小型タイプ:- 20℃~+ 60℃ | |||||
| アンテナ | - 50 ℃~+ 70 ℃ | ||||
| 防水規格 | IMU | ①標準:IP65 | IP65 | ||
| ②防水:IP68(水深 10m) | |||||
| 温度 | PCS | ①ラックマウントタイプ:10 ~ 80% RH 結露無き事 | 10 ~ 80% RH | ||
| ②小型タイプ:10 ~ 95% RH 結露無き事 | |||||
| アンテナ | 0 ~ 100 % RH | ||||
| 標準ケーブル長 | IMU | 標準8 m/ 防水 10m | 標準 8m | ||
| アンテナ | 標準 10 m | ||||
■インターフェイス
| POS MV SurfMaster | POS MV WaveMaster Ⅱ | POS MV OceanMaster | POS MV Elite | ||
|---|---|---|---|---|---|
| イーサネット | 機能 | POS MV 制御およびデータ収録 | |||
| データ | タイムタグ、ステータス、測位、方位、姿勢、ヒーブ、速度、航跡とダイナミックスピード、加速度、パフォーマンス指標、IMU データ、GNSS データ | ||||
| UDP ポート | ディスプレイポート:1 Hz、データポート:1 - 200 Hz | ||||
| RS232 (DB-9 オス) |
ポート | 5 ポート | |||
| NMEA 出力 | $INGGA、$INHDT、$INVTG、$INGST、PASHR、PRDID、$INZDA、UTC(1 - 50 Hz) | ||||
特別に示された箇所以外は、全仕様の値は RMS です。
MVPOSViewダウンロード
【MVPOSViewダウンロード】
POSMVの使用に際しては、以下に倣いご使用中のPCSとPOSView(ダウンロード)のバージョンを合わせてご使用ください。

慣性GNSSジャイロに関する基本技術
【光ジャイロの動作原理について】
光ジャイロとは、回転角速度を検出するために光を使用するジャイロのことです。代表的なものにはリングレーザージャイロ(RLG)や干渉型光ファイバージャイロ(Interferometric Fiber Optical Gyro、IFOG)などがあります。
POS-M/Vで使用される慣性センサーは、大きく分けてIFOGとMEMSジャイロに分かれます。このうち、FOGについては、リングレーザージャイロ(RLG)と併せて「光ジャイロ」と呼ばれます。
どちらも動揺検出(角速度)の検出において光(光子)を使用するわけですが、RLGは3軸の周りでレーザー光を発振して各回転方向についてミラーで閉じたループ内を反射させて時計回り、反時計周りに戻ってくる時間のずれを利用して角速度を検出するのに対し、FOGはレーザーではなく光波を用いてファイバーループ内を伝播する光の位相差を検出して書く速度を求めます。RLGはパルスレーザー発振のタイミングを制御することで角速度検出のダイナミックレンジを広く取れるのに対し、FOGは伝播物質としてファイバーを多用するためRLGよりも高額ですが性能を一定以上の品質に保ちながらもRLGより小型化しやすいのが特長です。
【FOGが角速度を検出するしくみ】
ここでは、FOGの角速度検出の仕組みについて説明します。
1.サニャーク効果(Harress-Sagnac effect)
ある閉じたループ上の経路に対して、時計回り、反時計周りの光が独立に伝播しているとします。この経路が角速度Ωで回転しているとすると、点Pから反時計周りした光が一周する間にPはP'に移動しており、Pにいる人(センサー)は光の戻ってくる時間が短く観測されます。また逆方向の時計回りをした光はPにいる人からは時間が長く観測されます(図1)。
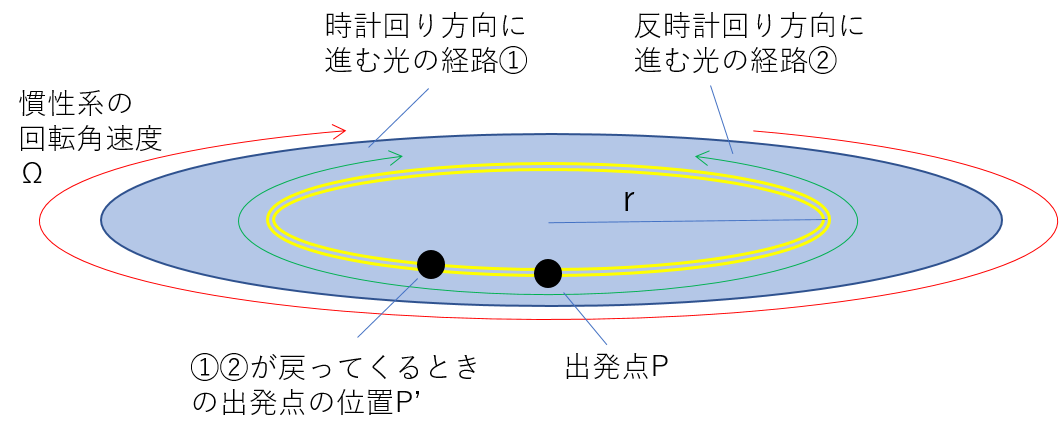
図1 回転している慣性系(図では円盤)上のループ経路上を時計回り・反時計周りに移動する光が1周してセンサー部分に戻ってくる様子
Pにいる人から観測される時間差は次のような式で表されます。
反時計周り:t1 = 2πr / (c - rΩ), ←回転速度分だけ相対速度が相殺される
時計回り :t2 = 2πr / (c + rΩ) ←回転速度分だけ相対速度が増加する
ここで、
t1, t2はPを出てそれぞれ反時計周り、時計回りに回った光を再びPで観測する時刻
cは光速度
Ωは角速度
rはFOGの半径
です。
この式から、時間差⊿tは次の式で表されます。

この結果からは、
回転運動をする系において、回転軸周りの閉軌道を回転方向と逆方向に移動する光は、系の中の出発点に戻ってくるのに要する時間にずれがあり、そのずれ量は角速度と閉軌道で囲まれた面積に比例する。
という事がわかります。
この効果を、サニャーク効果(Harress-Sagnac effect)と呼びます。
またこのときの光路差⊿Lは、光速度で⊿tの時刻だけ進んだものであるから、光波のドップラーシフト周波数⊿fは、
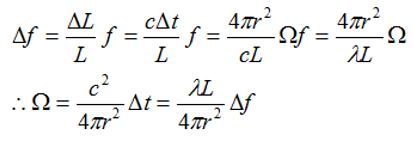
ここで、r、c、L、λはそれぞれFOGの半径、光速度、経路長、光波長を表しており、全て定数となります。
従って、この式が示しているのは、角速度Ωで回転する半径rのFOGにおいて、時計回り、反時計周りに放射された光が戻ってくる際の、光波の周波数シフト量⊿fを検出できれば、このΩを測定することができる
なお、この式から角速度検出の精度は半径の2乗に反比例し、経路長に比例します。それゆえFOGの性能を決める要因として、ファイバーリングの径(r)が重要である、ということが直感的にご理解頂けるかと思います。
【MEMSジャイロの動作原理】
では、光ジャイロとは別の、もう1つのジャイロである「MEMS」ジャイロについて解説します。
MEMS(Micro Electro Mechanical Systems, マイクロ電子機械システム)は、機械要素部品、センサー、アクチュエータ、電子回路を一つのシリコン基板、ガラス基板、有機材料などの上に微細加工技術によって集積化したデバイスのことを言います。製造工程上の制約や材料の違いなどにより、機械構造と電子回路が別なチップになるハイブリッド型の集積デバイスについてもMEMSといいます。
【慣性センサー】
1.IMUとは?
IMU(Innertial Motion Unit, 慣性動揺検出装置)とは、慣性系における運動状態を検出する装置です。すなわち、ジャイロ(角速度)、加速度計を使用して、他のセンサーの情報をもらわなくても自己の運動状態を知ることが出来る装置、ということが出来ます。
1970年代のRLGの登場とコンピュータの発達により、現在では加速度計とジャイロを運動体に直接取り付け、運動状態を計算で求める方式(ストラップダウン方式)が主流です。
加速度と角速度を自分だけで時々刻々と求めることができるため、時間積分を繰り返す事により姿勢、方位、速度、位置を算出するIMUは、誤差が時間と共に蓄積されていくという問題点を持っています。この誤差低減は、POS M/VのようなGNSSジャイロが出現するまでは長年の課題となっておりました。
【GNSSを用いたハイブリッド航法技術について】
1.GNSSとIMUの特性 このようなIMUですが、GNSSと組み合わせる事により、測位・動揺検出装置として長時間にわたり安定した運動状態の検出性能を維持することが可能になりました。
IMUは上に書いたとおり、毎回の観測においては非常に高い検出精度を持っており、データレートも非常に高く(ほぼ連続的)、プラットフォームの姿勢による精度劣化もありません。また自律航法であるため、他のプラットフォームによる誤差の悪化が生じません(下図)。
一方でGNSSは、毎回毎回衛星からの電波を受信して測位すると言う方式なので一時的な精度の低下やデータの欠如が発生することがあるものの、長い計測時間においては精度の良い測位が可能です。
そこで、GNSSの情報を用いて蓄積誤差の発散が抑えられるようにすることが出来れば、IMUの高精度計測性能を長時間にわたって維持できることが期待されます。
これらのシステムの特長を生かせるように運動状態の最尤推定(又は最小誤差推定)フィルタ処理※を用いることで、GNSS、IMUの計測値双方の計測結果に含まれる誤差を最小になるように推定して出力する、高精度な航法を可能にしたのがハイブリッド航法です。
※:
通常はIMU、GNSSともに誤差要因はランダム性が高いという仮定の下、カルマンフィルタのような線形適応フィルタが用いられることが多いですが、カルマンフィルタの初期値や収束アルゴリズムの工夫についてはメーカーごとに特徴があります。
【2種類のハイブリッド方式の違いについて】
ハイブリッド航法には大きく分けて次の2つの方式があります。主にカルマンフィルタのフィードバックループをどこまで考慮しているか、のちがいです。 1.オープンループ方式IMUのデータ、及びGNSSのデータをただの入力値とし、それらのデータから航法フィルタ(カルマンフィルタ)による運動データの最小誤差推定値を算出します。
2.クローズドループ方式 IMUのデータ、及びGNSSのデータを入力値とし、それらのデータから航法フィルタ(カルマンフィルタ)による運動データの最小誤差推定値を算出した後、そのデータをIMUの補正にも使用する方式です。
当然クローズドループ方式のほうが入力値に対する最尤推定処理を施している分、オープンループよりも外部センサーからの入力データの信頼性が高く効果も高いため、高性能のハイブリッド航法装置は殆どクローズドループ方式が取られています。
【タイトカップリング、ルーズカップリングって何?】
ハイブリッド航法における「カップリング」とは、GNSSとIMUのカップリングのことを言います。
1.ルーズ・カップリング
ハイブリッド航法におけるカルマンフィルタリング処理のうち、測位データを純粋な観測値として使用し、その情報をIMUの誤差推定・補正計算のみで使用する方法をルーズ・カップリングといいます。
2.タイト・カップリング
また、測位データの情報を測位情報の推定値を計算するための入力値として扱い、測位データとIMUデータの全てに関する補正量を算出して誤差を小さくする方法をタイト・カップリングと言います。
どちらの方式であっても、ハイブリッド航法の本来の役目である「互いの誤差に関する長所を活かしあう」方法には違いないですが、タイトカップリングのほうが測位データまで含めて最小誤差推定を行うので、より精度が高い運動状態を取得することが可能です※。
※:
一方で、センサーとしてのインターフェースを選ぶ(特定の組み合わせでないと実現しにくい)という問題はありますが、POS M/Vはその点でははじめから一体の製品として扱われているので、非常に高いインテグリティ(カップリングの統合性)を実現しています。
POS M/Vの持つキーテクノロジー
【GAMSTM技術について】
GAMS(GNSS Azimuth Measurement Subsystem、GNSS方位計測サブシステム)は、2つのGNSSで計測した測位情報と、それぞれのGNSS測位点(通常はアンテナ)の、IMUに対する位置関係から、高精度の方位補正情報を得る、Applanix社が独自に開発した仕組みです。POS M/Vでは高緯度での見出し精度の低下の問題を解決するためこのGAMSを採用しています。
IMUはその特性から、短時間での方位計測能力には優れていますが、長時間での安定性という意味では蓄積誤差が発散しやすいと言う問題があります。これを一定間隔で補正していくためにGNSS情報を与えてハイブリッド航法フィルタにより補正していくわけですが、方位に関しても2つのGNSS計測計測点(アンテナ)を用いて、方位を測定する事により、航法フィルタによるGNSS、IMU双方に関する方位の最小誤差推定計算が可能となり、補正データを生成することができます。結果として、GAMSを統合することで、ドリフトのない正確な方位が長時間安定して計測できるわけです。
また、POS M/Vがクローズドループシステムを採用した事により、GAMSがGNSS信号未測時で計測できない場合でも、IMUの計測値を使用して運動状態を補間することができます。
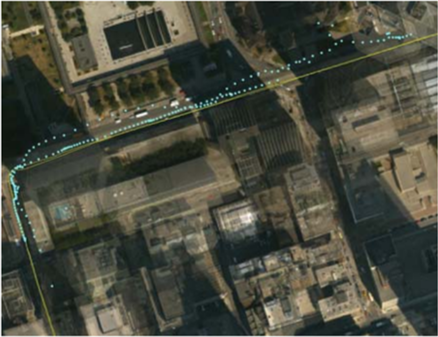
POSのGAMSを使用してビルの谷間を走行した航跡(実線)。GNSSのみ(点)の航跡に比べて、軌道の逸脱が無く安定した計測が可能になっている。
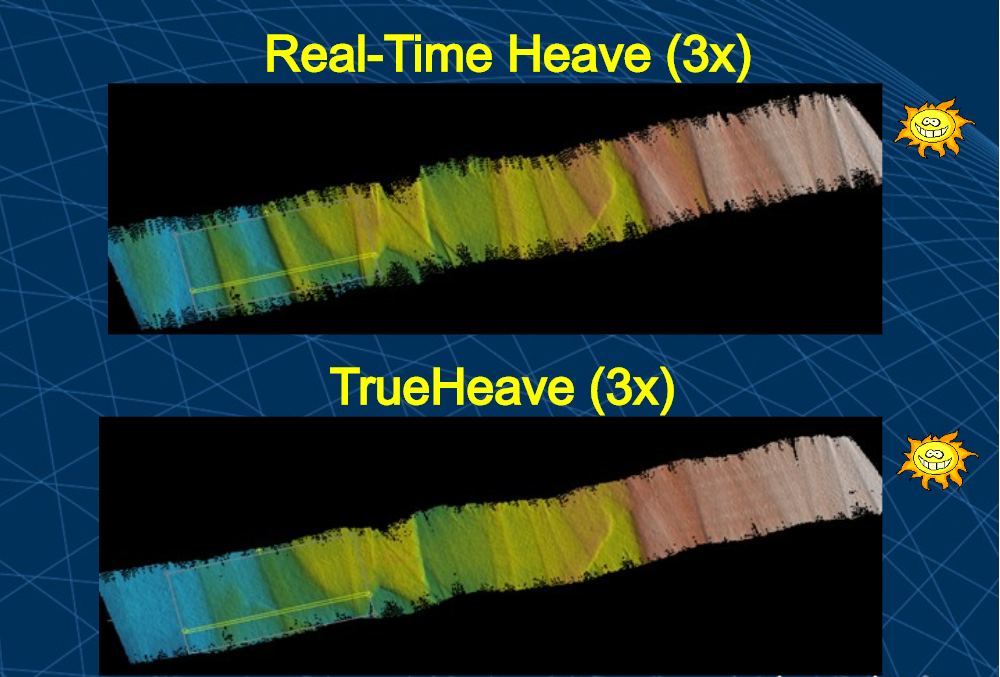
【TrueHeaveTMについて】
TrueHeaveTMは、Applanix社が開発したヒーブ値に対する最尤推定値を算出するアルゴリズムによって得られた、後処理ヒーブ算出技術です。
リアルタイムヒーブ(通常の動揺計測によって得られたヒーブ計測値)には一定の不確定性※1があると考えられるので、この不確定要因とその外乱要因が影響を及ぼす仕組みをモデル化し、得られた計測結果から「尤もらしい」値を推定します※2。
TrueHeaveTMではこの最尤推定のアルゴリズムとして、カルマンフィルタを用いています。これはヒーブの計測結果は加速度の計測から逐次計算されるという原理的な仕組みから、蓄積誤差の影響が発生しやすいためです。
カルマンフィルタでは、このヒーブ計算の際の加速度を観測値(入力値)とし、諸々の不確定性要因の存在を考慮してヒーブ値を計算する仕組みをモデル化してカルマンフィルタとしています。
※1:
計測誤差や電気ノイズなど、真の値に対して、計測のシステムに付きまとうランダム性又は系統的に発生する外乱要因。
※2:
尤もらしい、と言うのは統計学的に最も不確定性が小さくなる、と言う意味です。計測工学や統計科学として計測データを扱う際には、真実の値(真値)を正確に計測する事は困難であるという見地から、様々な不定性要因の影響を考慮して「これが最も確からしい値」という結論を出して、計測結果とするため、この「尤もらしい」という意味合いは「最も確からしい」と言う意味とほぼ同じになります。逆に、最尤推定を行わない多数回計測と言うのは、精度を評価していないただのばらついたデータの集まりに過ぎないという事になります。
口語として日常的に用いられる「いかにも道理に合っているように見える」「聞いていて内容を知らなければよいものに思われるような」という意味(従って「真実からは程遠いかもしれないが、その場しのぎ的にあわせこんだ、という拡大解釈的に計測結果を改ざんしているかのような意味)ではありませんので、ご注意ください。