小型自律無人潜水機YUCOシリーズ




YUCOは海洋業界に彗星のごとく現れた、実用的かつ低価格なピンク色のUUVです。Seaber社は小型UUVの運用者としての経験のあるメンバーによる実用的な運用構想に基づき、ロボット開発に長けた技術者のチームにより開発されました。
SEABERチームは、高い信頼性、正確な航行、無駄のない展開といったお客様の期待に応えるべく、様々なマイクロUUVを開発しました。YUCOは、シングルタスクで手頃な価格のUUVです。
特長
- 直感的に使用可能なハード/ソフト設計
- ユーザーによる分解等が必要な箇所を局限化して堅牢性を強化
- 高い慣性航法精度
- 一般的なUUVよりも手頃な価格
- 効果的な通信手段(WiFiを用いたミッション設定、トランシーバによるミッション指示と自己位置への帰投
仕様または構成
共通仕様
| 耐圧 | 300m |
|---|---|
| 重量 | 9.5-10.5kg |
| 長さ | 98-123cm |
| 直径 | 12cm |
| スピード | 8~10時間 |
| 航続時間 | 8~10時間 |
| 航行精度 | 移動距離の±2%(DVL塔載時) |
| バッテリー | 充電式バッテリーのみ |
YUCO PHYSICO
| 使用最大水深:300m | 速力:3.0~6.0kt |
| 全長:123㎝ | 空中重量9.5kg |
| 直径:12㎝ | 航行時間:10時間 @3kt、6時間 @4kt (リチウムイオンバッテリ使用時) |
AML-3RTの仕様についてはこちらをご参照ください
YUCO SCAN
| 使用最大水深:300m | 速力:3.0~6.0kt |
| 全長:101㎝ | 空中重量10kg |
| 直径:12㎝ | 航行時間:10時間 @3kt (リチウムイオンバッテリ使用時) |

| ドップラー流速ログ | サイドスキャンソナー |
|---|---|
| 周波数1MHz | 周波数:200 or 340 or 680Khz |
| 最大高度50m | 進行方向ビーム幅:0.5° |
| 最大測定流速:3.75m/s | 横方向ビーム幅:60° |
| 速度分解能: 0.01mm/s | レンジ:1chにつき最大50m |
YUCO PAM

| 使用最大水深:300m | 速力:2.0~6.0kt |
| 全長:98㎝ | 空中重量9.0kg |
| 直径:12㎝ | 航行時間:10時間 @2.5kt (リチウムイオンバッテリ使用時) |
| 音響ペイロード 仕様 | |
|---|---|
| アナログ帯域幅: 160 kHz | 最大感度: -165dB Re 1 V/μPaz |
| ADC: 24 Bits Stigma Delta | サンプリングレート: 2 kHz to 384 kHz |
| ダイナミックレンジ: 110dB (full bandwidth) | リムーバブル SDカードストレージ内蔵(最大4TB) |
| 設定可能ゲイン: 0dB - 45 dBz | レコーディングの計画・デューティ比の任意設定可能 |
YUCO CTD

| 使用最大水深:300m | 速力:3.0~6.0kt |
| 全長:112㎝ | 空中重量10.0kg |
| 直径:12㎝ | 航行時間:10時間 @3kt、6時間 @4kt (リチウムイオンバッテリ使用時) |

| 電気伝導度 | 湿度 |
|---|---|
| レンジ: 0.85mS/cm | レンジ:-5℃ to 42℃/td> |
| 初期精度:±0.003mS/cm | 初期精度:±0.002°(-5~35℃)、±0.004°(35~42℃) |
| 分解能: 0.001 mS/cm | 分解能:0.00005℃ |
| 特有安定度: 0.010 mS/cm per year | 時定数:-1s (標準)、-0.1 (オプション) |
| 特有安定度:0.002℃ per year |
YUCO Carrier

| 使用最大水深:300m | 速力:3.0~6.0kt |
| 全長:98㎝ | 空中重量8.0kg |
| 直径:12㎝ | 航行時間:10時間 @3kt、6時間 @4kt (リチウムイオンバッテリ使用時) |
YUCO-Carrerには、お客様それぞれのご要望に沿ったペイロードを搭載することが可能です。
テクノロジー
UUVの運用についての常識を塗り替える

YUCOを一目見れば、ソフトウェア/ハードウェア設計の画期的なアプローチに気づくはずです。
UUVの技術をすべてのタイプのユーザーが利用できるようにし、水中でオペレーターを解放して他のタスクを実行する自律型プラットフォームとして実際に使用できるようにするために努力しました。
シングルタスクのマイクロUUVに焦点を当てたコンセプトにより、手頃な価格、高い信頼性、迅速な現場展開ができる機動性を備えています。
生物にヒントを得た堅牢なデザイン

UUVの堅牢性は重要なポイントであり、マスト部やフィン部などの水漏れはUUVの最初のリスクとなります。
YUCOは2つのセクションで構成されており、中央と後方に位置するドライセクションは、ユーザーが開ける必要のない設計です。このセクションには、バッテリー、アクチュエーター、位置計測用センサー、CPUなど、ナビゲーションに必要なすべてのものが収納されています。前方のウェットセクションには、ユーザーがアクセス可能なペイロード(計測装置)が搭載されています。ウェットセクションには、新しいセンサーをプラグアンドプレイで素早く組み込むために、必要なすべてのコネクターも組み込まれています。
過酷な環境下でも日常的に使用できるように、マストやフィンなどの重要な部品は長年の検討を経て最適化されており、生物にヒントを得た堅牢な設計となっています。
直感的なナビゲーション体験「INX©」

SEABERチームは、YUCOマイクロUUVのために独自の高精度なナビゲーションシステム、INX©を開発しました。INX©は、自社開発の高度な水中ナビゲーションアルゴリズムに基づき、ナビゲーション性能を存分に生かすことが可能です。DVLと深度センサーが統合されており、沿岸水域で最も費用対効果の高いナビゲーションを外部操作なしに行うことができます。
直感的なミッションプランナー「SEAPLAN(シープラン)」
SEAPLANは、プログラミングの柔軟性、直感性、使いやすさを提供するパワフルでモダンなGUIです。様々な航法セグメントやパターンをプログラムすることができ、ペイロードの起動タイミングの柔軟な調整ができます。また、CTD や PAM に最適な「シャットダウン浮上」や「スパイラル航法」など、特定のペイロードに特化した独自のナビゲーションモードを提供します。
SEAPLAN インターフェースは、WiFi 経由でPCからアクセスできます。YUCOはミッション設定の作業中に充電することも可能です。
SEACOMM、YUCOを簡単に追跡・回収

UUVの使用における主なリスクの1つは、海上で紛失することです。そこでYUCOは、スムーズな回収を実現するためのいくつかの重要な機能を備えています。 水面上では、ネオンピンクのボディカラーと強力なフラッシュLEDにより、昼夜を問わず簡単に発見することができます。また、地上での通信を確保するため、YUCOのマストには衛星、GSM、無線の3種類の無線通信アンテナが搭載されています。 さらに、「SEACOMM」と呼ばれる携帯型リモコンは、水面のYUCOのGPS位置を表示し、「Come back here」機能という非常に便利な機能を備えています。
* 現在、技術適合認証の取得に向けて調整中です。
アプリケーション
YUCO-SCAN(搭載センサ:サイドスキャンソーナー、DVL)
YUCO-SCANに搭載されたサイドスキャンソーナーにより海底の可視化ができ、以下のような用途で使用可能です。
例:水中捜索(機雷、証拠品、溺者、構造物、等)、海底の底質調査
・YUCO-CTD(搭載センサ:CTD)
電気伝導度、温度、深さのデータを収録することにより、以下の用途で使用可能です。
例:水中音波伝搬の解析、環境調査、気象調査
・YUCO-PHYSICO(搭載センサ:AML社製AML-3)
AML-3プロファイラを用いることにより、多岐な物理センサで海中の環境調査が可能です。
例:音速度、電気伝導度/水温、深度、濁度、クロロフィル、pH等。
・YUCO-PAM(搭載センサ:ハイドロホン)
潜航後にモーターを止めて正浮力で浮上する際にハイドロホンで聴音させることで、以下の用途で使用可能です。
船舶/艦艇のスクリュー音解析、海洋哺乳類の生態調査、海中雑音調査、他
YUCO-CARRIER(搭載センサ:任意)
お客様ご要望の機能を搭載した用途が実現可能です。
ギャラリー
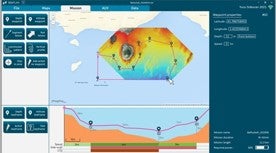
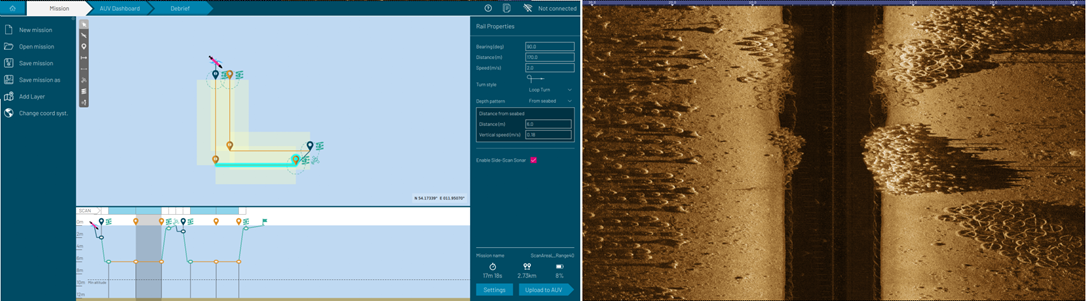
①YUCO-SCANのミッション計画とデータ例
海底地形や構造物からの反射強度をマッピングできます。 一定時間/距離の航走ごとに自動でGNSSの位置補正をさせることで一定の位置精度を保ったデータを収録することが可能です。
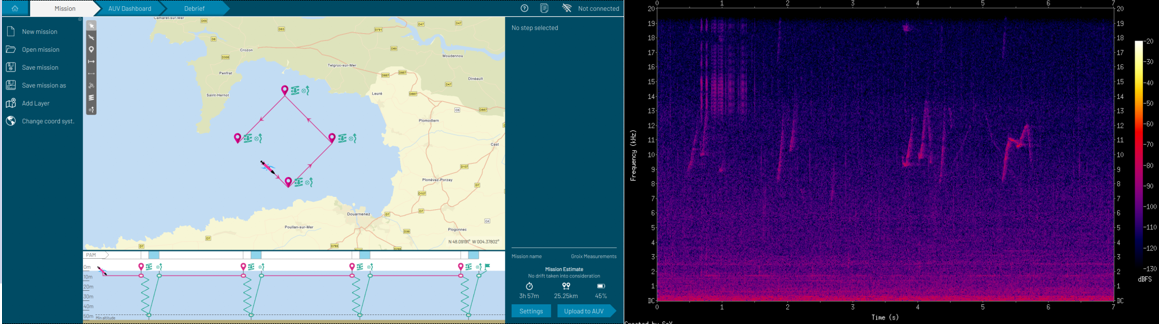
②YUCO-PAMのミッション計画とデータ例
螺旋パターンを描きながら垂直潜航をしたのち、スクリュー(モーター)を止めるとYUCOは正浮力で設計されているため自動的に浮上します。この状態ではモーターが停止しているためパッシブで水中の聴音をすることに適しているため、クリアな水中音響の収録が可能です。
③YUCO-CTDのミッション計画とデータ例
水中グライダーのごとく鋸状に潜航浮上を繰り返す航走パターンも設定可能です。 このような潜航パターンでデータ収録することで、海域における密なデータ収録が可能です。
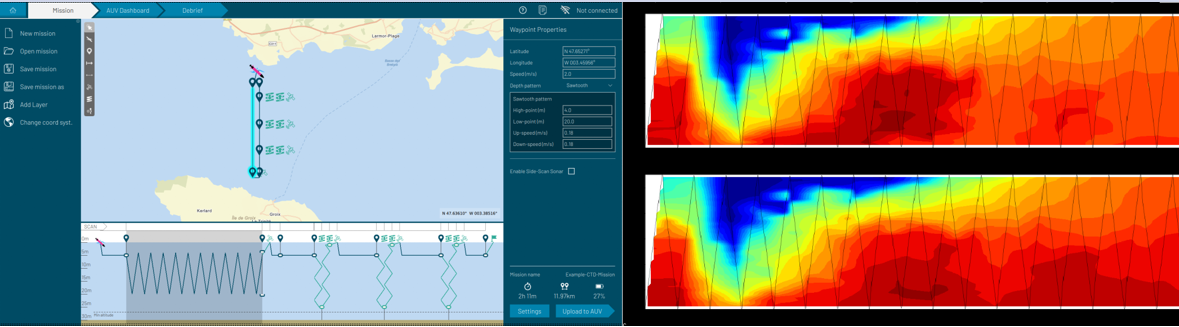
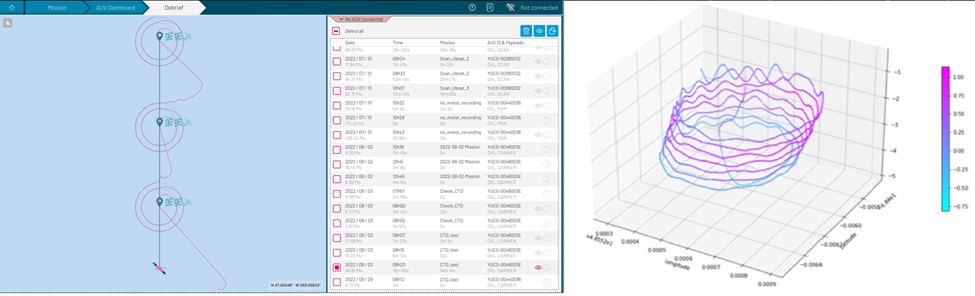
④YUCO-PHYSICOのミッション計画とデータ例
一定のポイント周辺で特定の物理データの計測をしたい場合には螺旋パターンでの潜航中にデータを収録させることも可能です。
動画
SBR+YUCO-SCAN+YUCO投入揚収風景
YUCO投入時、あらかじめ設定した深さよりも深く投げ入れることにより自動的にミッションを開始させるか、SEACOMMトランシーバを用いてマニュアルでミッションを開始させるか選択できます。 YUCOがミッションを終えると、YUCOからSEACOMMへミッション終了の通知が入るとともに自己位置の緯度経度が送信されます。オペレーターはこの緯度経度まで船で移動するか、SEACOMMから自動でYUCOが戻ってくるように「Come Back Here」コマンドを送ることで容易に揚収ができます。
* SEACOMMは、技術適合認証の取得に向けて調整中です。

SBR+YUCO-SCAN+YUCO-SCAN運用イメージ
YUCO-SCANを例に、ミッション策定➡投入➡ミッション開始➡揚収➡データ検証の流れをご覧ください。
