HYPACKに関する質問
7.ハイスィープ(HYSWEEP® Survey)に関するFAQ
Qリアルタイムマッピング(Real Time Mapping of Multibeam Data in HYPACK®)
FAQ ID:Q7-1
Surveyプログラムはリアルタイムで収録中のマルチビームソナーデータをマトリクスを使って水深毎に色分けしたマッピングを行なうことが可能です。マトリクス (*.mtx)は数百、数千の独立した長方形のセルから構成されます。Surveyプログラムはそれぞれのセル単位で水深値を保存し、色分けして画面に表 示することが出来ます。それぞれのセルはリアルタイムデータ収録中に測深済みの場所とその場所の水深値を色で知らせてくれます。マトリクスファイルは Designプログラムで作成することが出来、用途に合わせてセルサイズ、マトリクスサイズを変更できます。
Survey画面でマトリクスファイルを読み込むにはMatrixをクリック後、Loadをクリックしてください。 ファイル選択ボックスが表れ、読み込み可能なマトリクスファイルがリストとして表示されます。使用するマトリクスファイルを選択しO.K.をクリックして ください。

Figure 1: Matrix Settings dialog box in the Survey program
一度マトリクスを作成しSurvey画面にロードすると、Map画面の左端に水深毎のカラーバーが表示されます。カ ラーバーの水深、色を変更するときはカラーバーの上で右クリック後Settingメニューを選んでください。Settingでは始めに、最浅値、最深値、 色分けの数を指定します(図1参照)。Setting画面でApplyボタンをクリックするとSurvey画面にその色付けが採用されます。
色分けされたそれぞれのステップをクリックして、色をR-G-Bカラーバーから選ぶことが出来ます。色をスムージン グ(徐々にAからBへと色が変わる)をかけたいときは、その範囲内をドラッグし指定して、Smoothボタンをクリックしてください。処理終了後OK.ボ タンを押すと画面に結果が反映されます。
設定されたマトリクス範囲内での測量では、Surveyプログラムはマトリクスのセルに対して指定した色で塗りつぶしを行 います(図2参照)。各セルの水深データはマトリクスファイルに*.mtxのフォーマットで保存されます。MatrixメニューのSave as XYZからこれらの値をXYZのフォーマットで保存することが出来ます。ClearCurrentDataを選択することで現在表示されている色(水深 値)を全て消去することが出来ます。このコマンドを実行すると消去する前にデータを保存するかどうか 聞いてくるので、保存するときはYesしないときはNoを選んでください。UnloadメニューはSurveyプログラムから現在使用しているマトリクス ファイルを削除する場合に使用します。
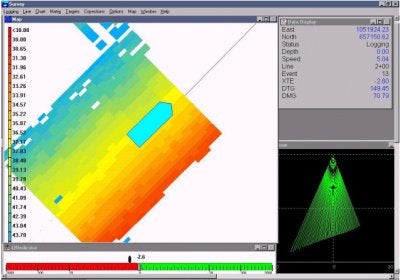
Figure2: Using a matrix to map multibeam data in Survey.
Qローカル・グリッドを設定して測量を行なっている時にSurvey Map画面に表示される船の向きがグリッドと合っていない!
FAQ ID:q2
下図のようにローカル・グリッドを回転(Rotation)させた場合、計画測線(LNW)やマトリクス(MTX)はこのローカル・グリッドの設定に基づいて作成されます。
しかし、方位センサからのデータは コンパス方位を出力しているだけです。
<処置> ローカル・グリッドを使用する時には、下図のように方位センサの"Yaw"オフセット(度単位)にもローカル・グリッドの回転角を設定して下さい。
QSeaBat81XX(サイドスキャンオプション付)のサイドスキャンデータを集録しないようにする
FAQ ID:Q7-2
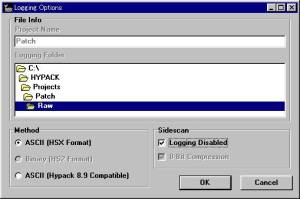
Hysweep Surveyプログラムの起動後に[File]-[Data Logger…]メニューを選択して表示される画面内のSidescan項目、[Logging Disabled]にチェックを付けて下さい。
これによりサイドスキャンのデータ(RSS)を集録しないようになります。
Qパッチテストの”不確からしさ”について(Patch Test Uncertainty)
FAQ ID:Q7-3
浅海域におけるマルチビームを用いた調査ではパッチテストで安定した結果を導くことがしばしば難しいことがあります。 ロールテストでは良い結果が得られても、レイテンシー、ピッチ、ヨーではなかなか良い結果が得られないことがあります。主な原因は、DGPSのポジション精度(+/- 2 meters)のためとなっています。 ポジション精度の劣化はマルチビームのキャリブレーションやパフォーマンステストに様々な影響を与えます。今回はロール、ピッチのキャリブレーションについて説明します。
まず、ロールキャリブレーションは、なるべく平らな地形を利用して行います。これはポジションエラーによる影響を極力省くためです。真に平坦な地形を利用することは困難ですが、結果に示されるように浅海域におけるテストでも+/- 0.1 °の再現性を得ることができます。
ピッチキャリブレーションはロールキャリブレーションとは異なり少々厄介なものとなります。なぜなら浅海域におけるピッチ誤差はポジション精度に強く依存するためです。 近似式を使用するとピッチの計算は以下のようになります。
a = sin-1 ( dp / z )
a :パッチテストの結果(pitch bias angle)
dp :ポジションエラー
z :水深値
ポジションエラーとピッチバイアスの関係
|
Case |
Water Depth (feet) |
Position Error (feet) |
Pitch Bias (+/- degrees) |
|---|---|---|---|
|
1 |
300’ |
6’ |
1.1 |
|
2 |
100’ |
6’ |
3.4 |
|
3 |
40’ |
6’ |
8.6 |
|
4 |
40’ |
3’ |
4.3 |
|
5 |
40’ |
1’ |
1.4 (Very good for DGPS) |
|
6 |
20’ |
6’ |
17.4 (Yikes) |
|
7 |
20’ |
3’ |
8.6 |
Qパッチテストの”不確からしさ”について(Patch Test Uncertainty II)
FAQ ID:Q7-4
レイテンシーテストのための測線ラインは、同じ方向を様々なスピードで海底地形を測量することによって行います。2つのオーバーラップしているラインが必要になります。全てのパッチテストと同様に、結果は、位置決めの精度によって変わります。同じくレイテンシーの結果は、異なるボートスピードによって変わります。それは、水深さによって変わることはありません。
レイテンシーをポジションエラー、及び、スピード変更と関係づける方程式は、簡単ではありません。:
レイテンシー= dp / ds
ここで、
latency:パッチテストの結果(GPS latency),
dp:ポジションエラー,
ds:船速の変化(ノット) ,
| Case | Position Error (feet) | Differential Speed (knots) | Latency Bias (seconds) |
|---|---|---|---|
| 1 | 1 | 2 | 0.29 |
| 2 | 1 | 4 | 0.15 |
| 3 | 1 | 8 | 0.07 (very good) |
| 4 | 3 | 2 | 0.88 |
| 5 | 3 | 4 | 0.44 (典型的な値l) |
| 6 | 3 | 8 | 0.22 |
| 7 | 6 | 2 | 1.76 |
| 8 | 6 | 4 | 0.88 |
| 9 | 6 | 8 | 0.44 |
最も良い結果は、最も小さいポジションエラー( duh )と最も大きい異なるボートスピードで得られます。典型的なコンディションの場合、レイテンシーテストの結果は、約0.5秒で異なります。それは、現実の 待ち時間より多いかもしれません。よりよい結果を得るためには、履歴をたどり、エラーを取り除くために多くのテストに関する平均結果を使用してください。
船速に関する考察:
スピード差を増加することが、更に良い結果を提供することを理解することは、容易です。より低いスピードで、測線に留まることは、難しいかもしれません。 また、より高いスピードでは、音響品質は、悪化するかもしれません。マルチビームを使用する多くの測量士は、より良い結果を得るために試行錯誤を行いま す。スクワット変異を追跡し、垂直オフセットを適応することも同じく重要です。
また、マルチビームオフセットとしてレイテンシーを入力してはいけません。それは、GPSのオフセットです。
Qパッチテストの”不確からしさ”について(Patch Test Uncertainty III)
FAQ ID:Q7-5
GPSポジションエラーがヨーテストに与える影響について説明します。
ヨーテストは様々な地形エリアで行います。同方向の測線を走行します。測線間隔は十分なオーバーラップができるようにするため、そのエリアの深さによって異なります。
ヨーとポジションエラーの関係は以下の式によって与えられます。
f = tan-1 ( dp / z )
f :パッチテストの結果
dp :ポジションエラー
z :水深値
ヨーとポジションエラーの関係
| Case | Water Depth (feet) | Position Error (feet) | Yaw Bias (+/- degrees) |
|---|---|---|---|
| 1 | 300' | 6' | 1.1 |
| 2 | 100' | 6' | 3.4 |
| 3 | 40' | 6' | 8.5 |
| 4 | 40' | 3' | 4.3 |
| 5 | 40' | 1' | 1.4 |
| 6 | 20' | 6' | 16.6 |
| 7 | 20' | 3' | 8.5 |
| 8 | 20' | 1' | 2.7 |
Qマルチビームパフォーマンステスト(Multibeam Performance Testing)
FAQ ID:Q7-6
このプログラムはマルチビーム測深機の精度を検証する際の参照用プログラムです。HYSWEEP Survey プログラムまたはMultiBeam Maxにて使用することができます。
以下に使用法でマルチビーム測深機の様々なテストを行うことができます。
バーチェック:
バーがマルチビームのどのビームに位置しているかを特定することが難しいことと、複数のビームがバーで反射するため、従来シングルビーム測深機で行われて いたバーチェックをマルチビーム測深機で実行することは困難です。そこで、一定時間にバーにあたる全ビームの平均値を結果とします。 測深とビームアングルゲートを使用して海底やバーをつるしているチェーンの影響を除くことができます。
マルチビーム動作確認
非常にシンプルなテスト方法を紹介します。まず、非常に狭い平坦なエリアを200パーセントのカバレッジで往復します。この調査では編集、グリッド化、平 均化したデータをリファレンスとして使用します。次にリファレンスを作成する際に使用した測線と直行するように1往復の測線を走行し、リファレンスとの差 を比較します。
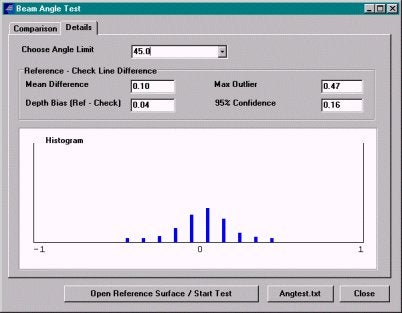
計算された統計値はリファレンスラインとの比較を示します。
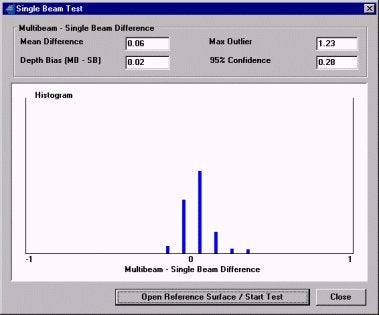
シングルビームとの比較
シングルビームとの比較は、上述のようにマルチビーム測深機で作成したリファレンス上をシングルビームで再度走行することで行います。
QHysweepプログラムにおける音速度補正(Sound Velocity Corrections in Hysweep Survey)[英語]
FAQ ID:*Q7-7M
We have been getting a lot of calls lately describing multibeam data that show signs of incomplete sound velocity correction. So it seems like a good time for some notes on this topic …
Why is it important to correct for Sound Velocity?
There are two reasons. First and most obvious, in order to calculate distance with sound (which all echo sounders do), it is necessary to know the sound velocity from the surface to the bottom - the sound velocity profile.
Second and less obvious, the path of sound from transducer to bottom and back (the ray path) is not always straight. When the speed of sound varies in the water column and the beam take-off angle is not vertical, sound is refracted and follows the tortured path shown in the diagram. Fortunately, if these values (beam take-off angle and SV profile) are known, it is possible to model the ray path. This is exactly what Hysweep® does and is how it is able to give correct sounding depths for multibeam sonar.
It should be easy to see that if the sound velocity profile is measured improperly, or if the profile changes, or if the profile doesn't match the area being surveyed, multibeam depths will be wrong.
It's worth noting that the errors increase greatly as the ray paths become less vertical, which is one of the main reasons that beam angles are limited to +/- 45 degrees for Class 1 surveys.
How Often Should SV Casts be Done?
This depends entirely on the water conditions where you survey. If you survey in fresh water with lots of mixing, the Niagara river for example, one sound velocity cast per day is sufficient. If you survey in an estuary during tidal changes, it may be necessary to cast every hour or so. It is best to start out taking SV profiles frequently to understand the water conditions. Then, if only small changes are seen between casts, it may be possible to back off.
Remember that if you do not have a good SV profile there is no way to fix your data. You can however, minimize the errors due to a slightly erroneous profile by limiting the beam angles.
Entering SV Profiles into Hysweep Survey
The sound velocity profile can be entered into Hysweep® Survey either manually or through the import feature. Manual entry is just a matter of keying in the depth and velocity pairs measured by the profiler. The import method takes advantage of the fact that many sound velocity profilers create a text file which can be loaded into Hysweep® Survey. Import is better if possible because it is easy (easy is good) and less prone to errors.
To enter or import a sound velocity profile into Hysweep® Survey, use Corrections menu, Sound Velocity. The diagram shows sound velocity on the Hudson River, with a lower velocity fresh water layer resting on top of a higher velocity salt water layer.
Real-Time QC
Earlier versions of Hysweep® Survey did not make the refraction corrections for the real-time displays. The reasoning was that it is too slow to make the proper corrections and that the displays would slow way down. But we had numerous requests from customers, so we went ahead and add the refraction corrections and what a great change that was, it didn't slow down the displays as much as expected either.
The screen shots (right) show the value of real time ray tracing for QC. The top view is corrected for refraction and the flat bottom indicates the SV profile is valid.
The bottom view is an extreme example of a bad SV profile. The edges of the sweeps are curled downward - the characteristic 'frown' of refraction errors.
Hysweep® Survey versions 0.5.21 and higher support the real-time ray tracing.