FAQ
HYPACKに関する質問
17.曳航体、ROV(Towfish - ROV)
ID.
Q. ROVが操作エリアに存在するか確認する
A.
ROVのオペレーションのために新しいデバイスドライバを作成されました。ドライバの目的は、ROVがいつそのオペレーティング限界に達したかをオペレーターに通知することによってROVの安全なオペレーションを維持することです。
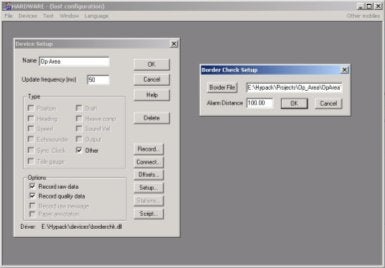
オペレータは、ドライバを利用するために、最初にHypackでBorderファイルを作成しなければなり ません。Borderファイルを作成しているとき、最後のポイントは、エリアの中または外で右クリックをします。この操作によって境界を閉じることができ ます。右クリックのロケーションは、ROVがその境界のどちらに存在するかによって決められます。あなたが境界の中でクリックするならば、ROVは、境界 内をオペレーションエリアとして扱います。そのドライバは、境界をオペレーションエリアとしても排他エリアとしても扱うことが出来ます。下記は、 Hardwareプログラムのセットアップの例です。
次のイメージは、Surveyプログラム上でバージニアビーチ沖のオペレーションエリアに入る軍艦を示しています。これは、港からオペレーションエリアの外へ出ることの計画トラックを用いて作成されたシミュレーションです。

上のイメージにおいて、船は、境界線の外にあり、アラームが表示されている。
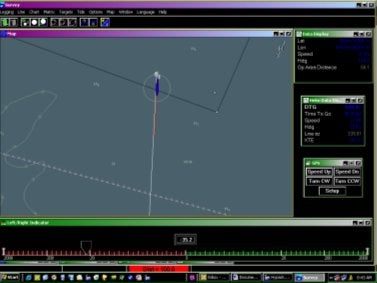
このイメージにおいて、船は、100フィートのアラームリミット内に存在する。

最終的に、船は、オペレーションエリアの内側にあり、オペレーションエリアの端への距離がData Displayにリストされることに注目してください。船の周りに、ビジュアルバッファアラームとして500フィートのサークルが表示されます。同じく船には、意図した動きのために10秒ベクトルが表示されます。