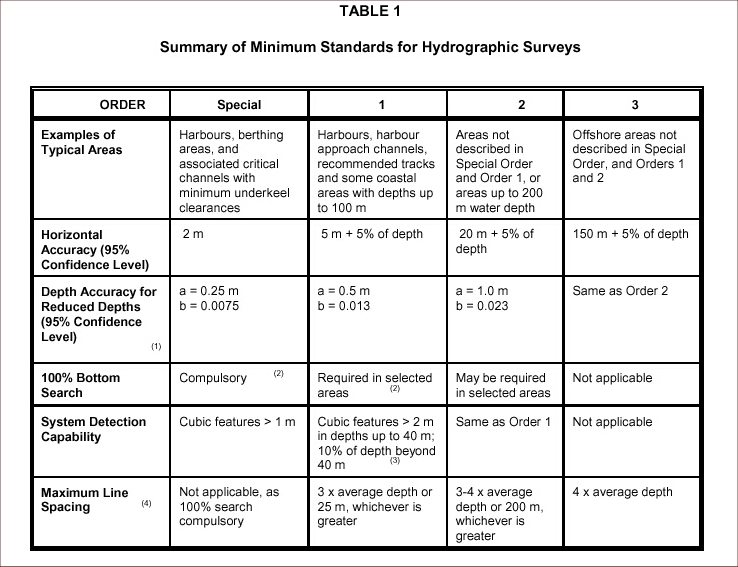
マルチビーム測深システム精度検証方法
精度検証方法例
以下はUSACE 精度検証方法です。
この検証方法の内容は以下の通りです。
1. シングルビームとのデータ比較
2. データ再現性の検証
手順は以下の通りとなります。
ⅰ)GPSによる水平位置誤差の影響を最小限にするために、検証エリアとしてできる限りフラットな場所を選択します。
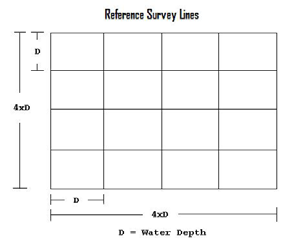
ⅱ)以下の条件で測線を設定します。
- 平行な5本の測線を設定
- 上記5本の測線に直行する平行の5本の測線を設定
- 測線間隔は全て水深と同じとする
潮位計測による誤差を最小限とするために、潮位変動の少ない時間に走行します。また、音速度のデータは直前に計測するものとします。
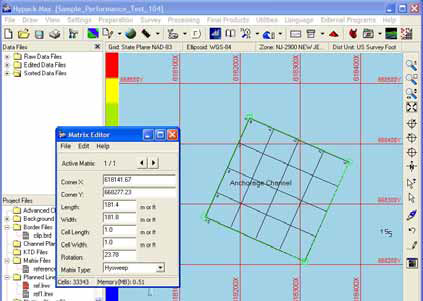
ⅲ)以下の条件でマトリックスファイルを作成します。
- 測線の外周に沿ってマトリックスファイルを作成
- セルサイズは1m×1mとする
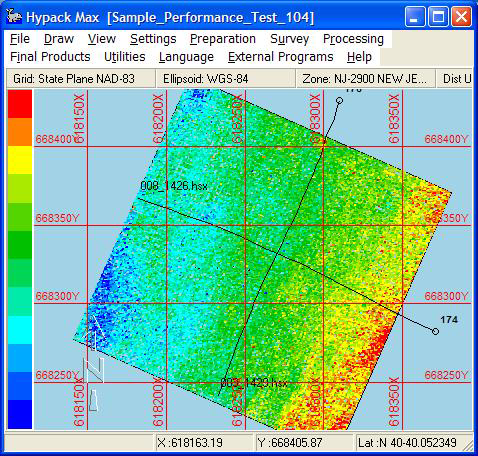
ⅳ)取得したデータを以下の条件で解析し、マトリックスファイルに保存します
- 音速度・潮位を適用
- フィルター機能により±45°以上のデータを削除
- セルの平均値”Cell average”を保存
ⅴ)同一エリア内で直交する2つの測線を走行します。
(マルチビーム、シングルビーム両方の測深データを収録します。)
MB-MAXでマルチビーム測深データを潮位補正と音速度を適用してデータ解析をします。このデータに対してフィルター処理は行いません。
SB-MAXでシングルビーム測深データを潮位補正と音速度を適用してデータ解析をし、XYZファイルとして出力します。
ⅵ)マルチビーム検証結果出力例
上記方法により、ビーム角度によるデータのばらつきを検証することができます。
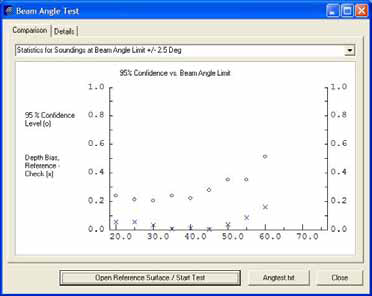
ア)ビーム角度によるデータの再現性グラフ例
横軸:直下からの角度
縦軸:深度差
×:リファレンスとチェックラインの測深データの差
○:最大差
○の値がIHO及び海上保安庁の精度基準値以内であれば適合と判断できます。
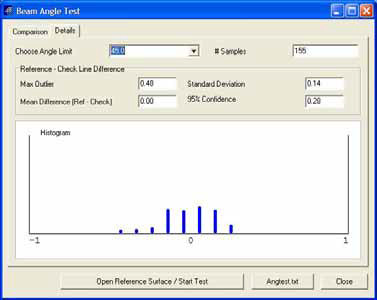
イ)任意の角度のデータ分布
指定した角度におけるデータの分布を確認できます。
Samples:データの母数
MaxOutlier:最大差
StandardDeviation:標準偏差
MeanDifference:最頻値
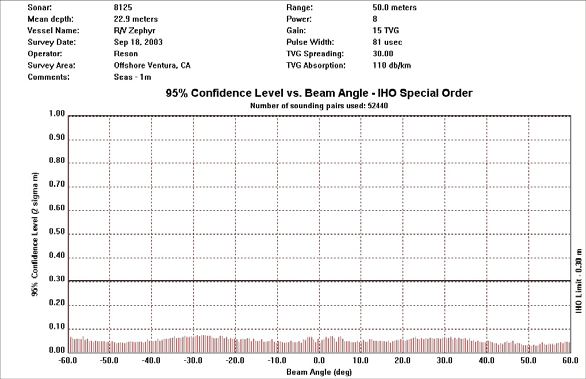
95%Confidence:精度
ⅶ)シングルビームとの比較検証結果出力例
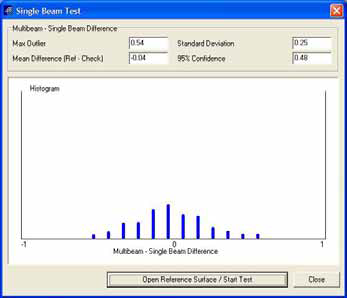
シングルビーム測深データとの比較グラフが表示されます。
ⅷ)測深システムの精度については上記手順でも検証可能です。
ロール、ピッチ、ヒーブ、方位を計測するPOS/MVについては、起動時に自己キャリブレーションが行われます。自己キャリブレーションを実行すると、POS/MVコントロールソフトウェア上に各精度が表示されます。
GPSについては、同一システムを使用して、基地点の座標上にて1000データほど収録し、データのばらつきを検証することを推奨致します。
参考:
RESON社によりSeaBat8125とPOS/MVの組み合わせによりIHO適合試験が実施されておりますので、参考に検証結果を添付します。