![これからの自動車計測はどこへ行く[2/3]|自動車計測ポータルサイト|東陽テクニカ](https://assets.toyo.co.jp/files/user/solution/car/images/column_15100.jpg?v=1669719239)
CONTENTS
執筆者:株式会社東陽テクニカ 草村 航
印刷される方はこちらをご覧ください。
(PDFファイル・サイズ 896KB)
自動車の先進安全技術
近年の自動車には多くの先進安全技術が搭載されており、人や車の飛び出し、走行レーンの逸脱、死角からの人や車の接近などを検出し、運転者を支援します。自動運転においては、車両自体が認知、判断、行動(車両の制御)を行う必要がありますが、ベースとなる技術は運転者支援技術と同じです。このような先進安全技術が、今後の安心・安全・快適な交通社会を支えていくのだと思われます。
人の行動を理解する
先進安全技術を考える上で、人(歩行者や運転者)の行動を理解することは不可欠です。例えば、図1のように横断歩道のない道路の歩道に歩行者がいる場合を考えてみましょう。

図1:横断歩道のない道路の歩道に歩行者が立っているイメージ
歩行者は道を渡ろうとしている可能性もありますし、タクシーが来るのを待っている(道を渡ろうとは思っていない)可能性もあります。運転中に最も注意しなければならないのは歩行者の飛び出しですので、運転者は歩行者を認識したら、飛び出しに備えアクセルペダルから足を離してブレーキペダルの上に足を置き、スピードを落としていつでも停止できるよう準備をします。また、車両が歩行者に近づくほど、制動距離を短くするために運転者はスピードを落とすよう調整します。そして、歩行者が飛び出してこないと判断したときに、運転者は「そのまま通過する」ことを決心します。
このとき、運転者は何を根拠に歩行者が「飛び出さない」と判断するのでしょうか。一つの判断基準は歩行者の顔から得られる情報です。歩行者がこちら(車両)を見ていたら、「渡りたい」という意思表示かもしれませんが、少なくとも歩行者は車両の接近に気付いており、飛び出す可能性は低くなります。しかし、こちら(車両)を見ずに道路の反対側を見ていたら、飛び出す可能性は前者より高くなるかもしれません。その他、歩行者が歩き出そうとする動作や、どの方向に向かって動こうとしているのかなど、運転者は深く意識はしていなくても細かく観察して判断します。
もし車両(先進安全技術)の判断と運転者の感覚が異なると、運転者は不快に感じるかもしれません。例えば上述のシーンにおいて、運転者は「歩行者は飛び出さない」と判断したのに対し、車両(先進安全技術)は飛び出すと判断して停止したら、運転者は「なぜ?」と思うでしょう。飛び出す可能性を考慮してスピードを落とす場合でも、運転者の感覚と異なる減速を車両が行った場合、運転者は違和感を持つでしょう。このような違和感は、時には運転者に誤った操作を誘引してしまう危険性もあります。
もちろん逆の場合もあります。人間の判断ですから、「まさか飛び出すと思わなかった」ということもないわけではありません。運転者は「飛び出さない」と判断したのに実際には飛び出してきた、という事故を防ぐためには、運転者の判断とは異なる判断を車両がしなければなりません。そのためには、歩行者の行動を十分に把握する必要があるのと同時に、運転者の心理や判断、そして行動を理解する必要があります。
人の行動を「はかる」
では歩行者が道を渡ろうとするとき、運転者は何を見て、どのような判断を行い、そしてどのような行動を取るのでしょうか。実際にこのようなシーンで計測を行ってみました。
使用した計測機器
- A) 位置座標計測:GPSアンテナ
- B) 車両速度、ペダル操作、位置座標計測:データロガー「imc CRONOSflex」
- C) 運転者の視線計測:非接触式視線計測システム「Smart Eye Proシステム」
- D) 歩行者の運動計測:運動重心計測ウェア「KGウェア」
計測機器の配置
図2に示すように、車両にはA)~C)の機器を搭載し、車両位置情報(走行軌跡)、車両走行情報(速度、ペダル操作)、運転者の視線を計測します。車両の前方の歩行者には「KGウェア」を装着して運動を計測します。車両に搭載した計測器と歩行者に装着したKGウェアは無線トリガにて、同時にスタートさせます。
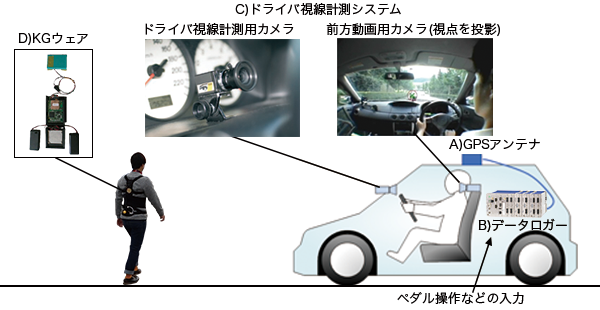
図2:各計測機器の配置
実験内容
実験は2つのケースを実施しました。
ケース1:道路脇に立っている歩行者の前を車が通り過ぎる
ケース2:道路脇に立っている歩行者が車の前を横切る
実験結果
ケース1:道路脇に立っている歩行者の前を車が通り過ぎる
GPSデータをもとに描いた車の走行軌跡を図3に示します。走行開始位置、終了位置、そして歩行者が立っている位置をそれぞれグラフの中に示します。この図からわかるように、車はゴール手前で歩行者の横を通り過ぎることになります。
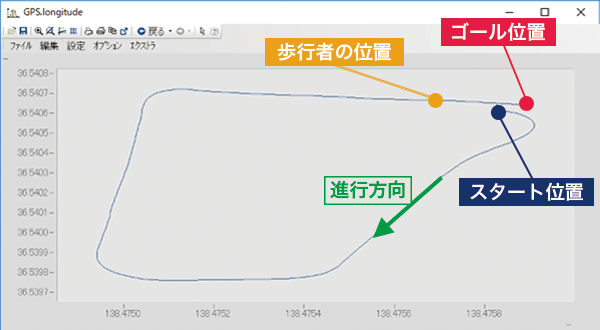
図3:GPSによる走行軌跡とスタート/ゴール/歩行者の位置
次に車両の走行データを図4に示します。ブレーキは、ブレーキスイッチ(ブレーキランプ点灯/消灯)の信号になります。波形が立ち上がっている箇所がON(点灯=運転者がブレーキを踏んでいる状態)であることを表します。
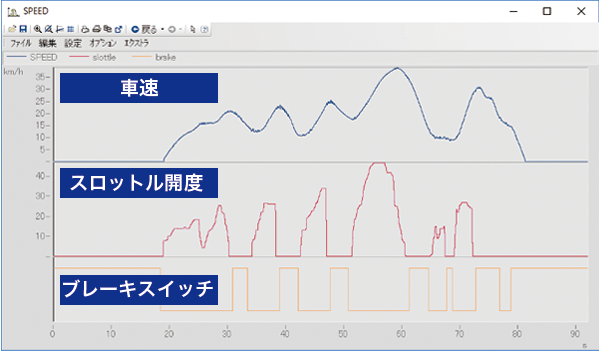
図4:車両データ(車速、スロットル開度、ブレーキスイッチ)
最後に視線計測システムのデータを図5に示します。この画像からは少々わかりづらいですが、下り坂の終盤に歩行者が立っていて、青い丸が視線計測システムから得られる運転者の視点(注視点)になります。

図5:視線計測システムのデータ
データの解析は、波形解析ソフトウェア「imc FAMOS」を用いて、運転者の視点(注視点)、車両情報(車速やペダル操作)、GPS位置座標情報を同期して表示し、それぞれのデータの関連性を確認しました。図6以降において、赤枠で囲っている部分がそれぞれのグラフ(あるいは画像)の同時刻を示します。
運転者が最初に歩行者を認識した(歩行者に視点を合わせた)のは、図6の赤枠のタイミングです。右折してやや細い下り坂に入って間もなくです。この時点ではアクセルペダルを踏んでおり(スロットルが開いている)、ブレーキペダルは踏んでいません(ブレーキスイッチはOFF)。
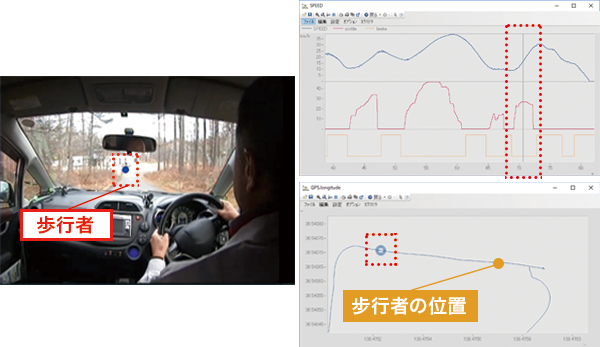
図6:運転者が最初に歩行者を見た瞬間
なお、本解析では運転者の視線(注視点)が歩行者に重なったタイミングを「運転者が歩行者を見たタイミング」と定義しており、走行中最初に運転者の視点(注視点)が歩行者に重なったタイミングを「運転者が歩行者を認識したタイミング」としています。視点が歩行者に重なっていなくても、運転者の視界には歩行者は入っており、運転者は歩行者を認識している可能性はありますが、視界に入っていることと認識していることはイコールではない可能性を考え、上記のような定義にしました。
図7は、運転者がアクセルペダルから足を離したタイミングを示します。ここでは、スロットル開度が急激に下がったことをアクセルペダルから足を離したと定義しています。
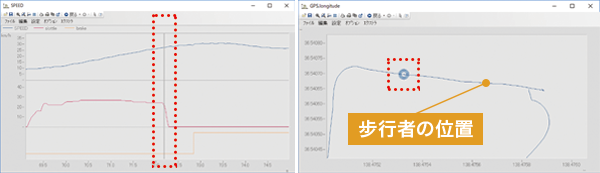
図7:運転者がアクセルペダルから足を離した瞬間
図8は、運転者がブレーキを踏んだ瞬間(ブレーキスイッチがONになった瞬間)を示します。運転者がアクセルペダルから足を離してからブレーキペダルを踏むまでの時間はおおよそ0.7秒でした。ブレーキペダルを踏んだ(ブレーキスイッチがONになった)時点では、すぐに車速は落ちていないため、ブレーキスイッチがONになってはいるものの、実際の制動力はあまり加わっていないことが推測されます。つまり、万一に備えてブレーキペダルに足をのせて、少しだけ踏み込んでいる状態だと思われます。
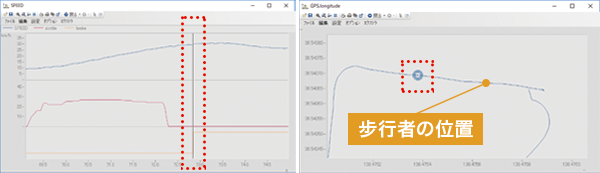
図8:運転者がブレーキを踏んだ瞬間
図9は、制動中の状況を示します。ブレーキを踏み続けている間(ブレーキスイッチがONになっている間)、運転者の視線は概ね歩行者に集中していました。もちろん常に歩行者を見ているわけではなく周囲も見ていますので、歩行者を中心に視線が細かくバラつきますが、基本的には歩行者に集中していたと考えられます。
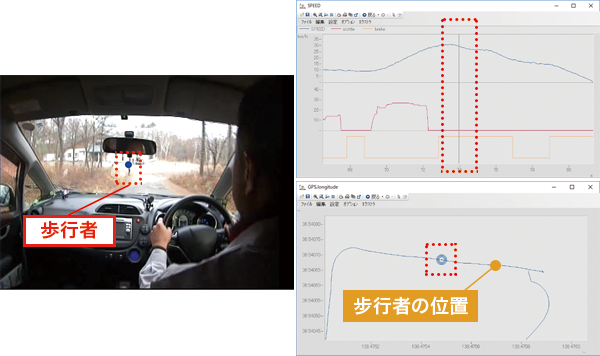
図9:制動中の状況
運転者がブレーキペダルから足を離した(ブレーキスイッチがOFFになった)のは、図10に示すように車両が歩行者の前を通り過ぎてからです。つまり、歩行者の前を通り過ぎた直後まで、万一に備えてブレーキを踏んでいたことがわかります。
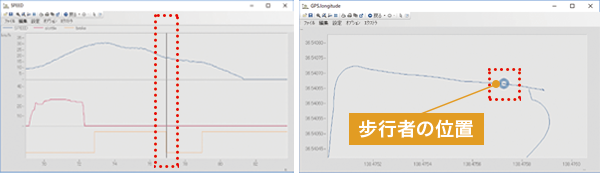
図10:運転者がブレーキペダルから足を離した瞬間
ケース1の実験では、運転者が歩行者を見ているとき、歩行者の頭部を見ていたことがわかりました。歩行者がどちらを向いているのかという情報を得るために、顔を注視していたと考えられます。この実験では、敢えて歩行者は車を見ずに、道の反対側を見るようにしました。運転者は歩行者がこちら(車側)を見ていないため、車を認知しているのかどうか心配になり、顔を注視していたのではないかと思われます。
ケース2:道路脇に立っている歩行者が車の前を横切る
続いて、歩行者が道を渡る(車両の前を横切る)場合について実験を行いました。走行ルート、使用機器はケース1と同じです。
最初に計測機器D)運動重心計測ウェア「KGウェア」にて取得した歩行者のデータを図11に示します。
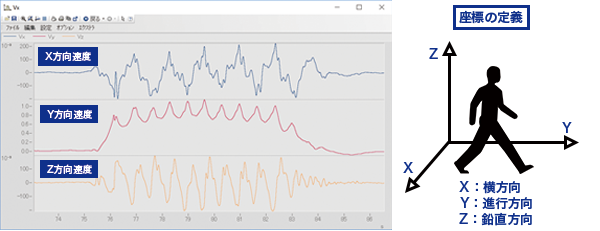
図11:KGウェアによる計測データ
図11は、歩行者が歩行した際の体(重心位置)の3方向速度(X,Y,Z)を示しています。歩行者が1歩足を前に出すたびに進行方向(Y方向速度)のデータが上下に変化しているのがわかります。これは足を1歩前に出して体(重心位置)を前方に移動させるときに速度が上がり、もう一方の足のかかとが地面についたときに体(重心位置)の速度は落ちるからです。それと同時に、横方向(X方向)もプラス方向(進行方向に対して右)とマイナス方向(進行方向に対して左)に振れているため、体(重心位置)を左右に振って(重心移動をしながら)歩いていることがわかります。また、上下方向(Z方向)の重心移動が見てわかります。
このように歩行者の動きがわかる「KGウェア」のデータと車両データからの考察を行いたいと思います。
図12を見てください。前方の画素が粗く歩行者の様子が不明瞭ですが、運転者が歩行者を認識しアクセルペダルから足を離したとき、歩行者は既に歩行を開始しています。ケース1では、アクセルペダルから足を離してブレーキペダルを踏むまでの時間は約0.7秒でしたが、ケース2では約0.5秒と短くなっています。歩行者が歩き出したことにより、ペダル操作の反応が早くなったものと考えられます。
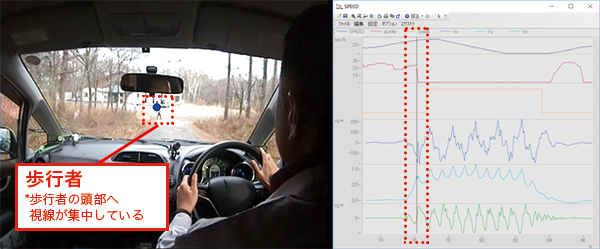
図12:運転者が歩行者を認識してアクセルペダルから足を離した瞬間
「KGウェア」による歩行者の歩行データをよく見ると、歩行者の初動は速度変化が小さい(X方向とZ方向の初動は小さい)ことがわかります。つまり歩行の第1歩は第2歩以降と比べて動きが小さいということです。運転者がアクセルペダルから足を離したとき、既に歩行者は第2歩目の動きに入っていますが、運転者が歩行者の歩行を認識してから判断と行動を行うまでの時間を考えると、運転者は歩行者の小さな初動を捉えて判断を行ったと言えるでしょう。
車両が完全に停止した(スピードが0になった)とき、図13のように歩行者は横断の終盤にありました。
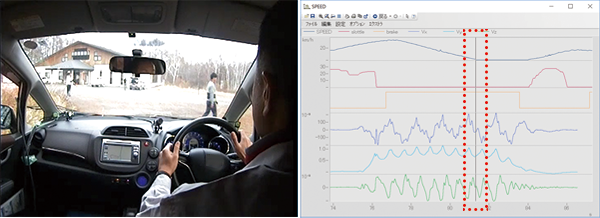
図13:車両が停止した瞬間
考察
今回の実験は非常に簡易的に実施しましたが、運転者の動きと歩行者の動き、そしてその相互関連性を把握することができました。ただし、ケース1とケース2を各1回という少ない実験回数でしたし、歩行者や運転者も1人ずつでした。統計的な推論を述べるにはあまりにもデータが少ないため、今回の実験で得られたデータはあくまで参考に過ぎません。しかし「恐らくこのような傾向にあるだろう」という仮説を立てるための材料にはなり得たと考えています。
運転者がいつ歩行者を認識し、その後どのようなタイミングでペダル操作を行うのか―このような人間の感覚にADAS(先進運転支援システム)や自動運転をどこまで近づけるべきなのでしょうか。図12で示したように運転者は歩行者のわずかな動きを検知して判断と操作を行っていると考えられます。もしかしたら車載センサも歩行者の顔の動きや表情、そして重心位置のわずかな変化を検出しなければならないのかもしれません。
自動運転レベル3(条件付自動運転)の実用化に向けた開発が進む中、このような人(歩行者と運転者)と車の計測需要はさらに高まることと考えます。当社はこのような計測技術をエンジニアに提供することで、安心・安全・快適な交通社会の実現に寄与していきます。
補足ですが、運転者の計測項目として、踏力センサや筋電センサを利用した方がさらに細かい運転者のデータが得られたでしょう。例えば、今回ブレーキペダルの情報はON/OFFのみでしたが、踏力センサを使えばONの中でも強く踏んでいるのか、軽く踏んでいるのかがわかります。これによって運転者の状態をより詳細に把握することができます。筋電センサは、ペダル操作を行う足の筋肉変化だけでなく、心拍の変化も測ることができます。歩行者の行動の違いによる運転者の心拍変化もわかるでしょう。今回の試験の結果を踏まえ、次回の試験方法を検討してみたいと思います。
【これからの自動車計測はどこへ行くシリーズ】 技術コラム
- これからの自動車計測はどこへ行く [1/3]
自動運転実現のために今後必要となる計測手法を探る!歩行者、運転者、そして自動車の挙動を測ることによって、車両自体が制御を行うより高度な自動運転、より安全で能率的な輸送システムの実現に役立ちます。計測の専門家集団、東陽テクニカだからこそできる実験に挑戦しました。3回連載の第1回目です。 - これからの自動車計測はどこへ行く [2/3]
自動運転実現のために今後必要となる計測手法を探る!歩行者、運転者、そして自動車の挙動を同じ時間軸の中で測ることによって、車両自体が制御を行うより高度な自動運転、より安全で能率的な輸送システムの実現に役立ちます。計測の専門家集団、東陽テクニカだからこそできる実験に挑戦しました。 - これからの自動車計測はどこへ行く [3/3]
自動運転実現のために今後必要となる計測手法を探る!3回連載の第3回目は、一般道路での車両に「閉じた」計測実験レポートです。一般道路の周回路を実際にドライブしてデータを取りました。車両の運動(運動、速度、加速度)をIMU(慣性計測装置)を使って計測して求める方法を紹介します。


本記事に掲載の計測試験に
ご興味がございましたら
お気軽にお問い合わせください
