![これからの自動車計測はどこへ行く [1/3]|自動車計測ポータルサイト|東陽テクニカ](https://assets.toyo.co.jp/files/user/solution/car/images/column_15017.jpg?v=1669719239)
CONTENTS
執筆者:株式会社東陽テクニカ 二上 貴夫
印刷される方はこちらをご覧ください。
PDFファイル・サイズ 716KB)
機械計測から情報計測まで
東陽テクニカは計測の専門家集団として自動車のR&Dに関わる複数の領域に携わってきました。機械振動や騒音の計測、操縦の安定性試験などは半世紀の経験を持ちます。さらに、コンピュータ制御の発達につれて制御ソフトウェアの品質計測(MISRA-C)、制御機能の安全性分析や評価といった機能安全(ISO 26262)にまで関わっています。つまり、自動車の機械的側面の計測に始まり、自動運転で重要なソフトウェア機能計測までをカバーしているわけです。機械、電気、電子、情報を統合的に「計測」できる会社は珍しいと思います。そのユニークな視点で、これから必要になると私たちが考えている計測について説明します。実際の計測実験の手順や結果は次回以降に紹介します。
今後必要となる計測手法
R&D計測の視点で自動車の開発を眺めてみると、これまでは、自動車という「箱」と箱に入る「人」のための開発が主体でした。自動車の本質が「輸送機器」である以上これは当然のことでしょう。しかし、自動車がコンピュータとソフトウェアを部品として使うようになり、それらが人の目や耳の機能を補助しやがて凌駕しようとしている現在は、以前に増して人のふるまいと自動車挙動の相互作用を考える必要性が増しています。
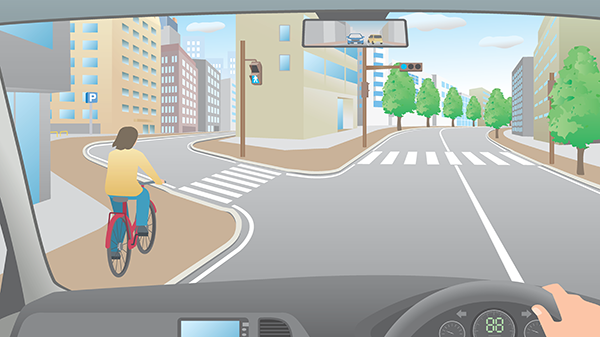
普段、街中で車を運転しているとき、運転者は周囲に歩行者がいることを心に留めながら運転するものです。例えば、「もし歩行者が5m先の横断歩道を渡るなら、こちらは停車しないといけないな。でもまっすぐ行くなら関係ないや。」などと、心の内で想定しながら運転を続けます。特に、横断歩道や交差点という、ヒト第一優先の付近で行う右折・左折は運転者が一番気を遣う(つまり論理的な思考を大量に行う)場所でしょう。
こうした所作を運転者の陰で並行して実行し、運転者が時に起こしてしまううっかりミスを補ってくれる車、というのは車のオーナーにとって大変に嬉しい存在のはずです。追突回避のアクティブセーフティが、近年乗用車の売り上げを左右するようになっています。車と車のアクティブセーフティだけでもこの様ですから、車と歩行者のアクティブセーフティも重要でないわけがありません。
私たちは、これからの自動車R&Dでは、歩行者・運転者・自動車という3カテゴリーの対象を計測し、安全で能率的な輸送システムを実現することが必要と考えています。このためには、CAE(コンピュータ支援エンジニアリング)で問題領域を明らかにしたうえで、実際の運転や歩行を実施する必要があるでしょう。
ヒトとクルマの同期計測
東陽テクニカは、自動車メーカーでも部品メーカーでもない、計測の専門集団です。ですから車づくりの本当のところはわかりませんが、多くの社員は普段から車を運転していますし、さまざまな会社の車の専門家からの計測ニーズを聞いています。2018年の秋、こうした恵まれた環境を活かし、少し先取り的な計測実験をやってみようということになったのです。
課題は、「歩道や横断歩道を歩いている人の運動」と「車両の運動」、そして「運転者の挙動(視線やブレーキ操作)」を、全体系として同じ時間軸の中で同時計測することです。それぞれ単体で測ることはもちろん可能ですが、それを同一時間軸に納める(いわゆる“同期計測”)は、意外と手間暇がかかったり、うまく計測できなかったりするものです。しかも、「既存の計測装置をうまく利活用して、人と車の問題は何かを知りたい」といったパイオニアワークでは、計測機器のそれぞれの特徴もあるので失敗しがちです。それを東陽テクニカがやってみよう、というのが今回の主旨です。
使うツールは、
- A) 位置座標計測:GPS
- B) 車両速度、ペダル操作計測:CANバスのデータロガー「imc CRONOSflex」
- C) 運転者の視線計測:非接触視線計測システム「Smart Eye Proシステム」
- D) 歩行者の運動計測:運動重心計測ウェア「KGウェア」
具体的な計測としては二つの実験を実施しました。
実験1:敷地内での人と車両の同期計測

実験1は、「人の歩行の精密な運動」と「車両データ」の同期計測を行います。実験の開始時点で歩行者と車は数百メートルも離れた位置にあり、この計測同期をとるにはいくらかの工夫が必要です。ここで紹介する計測は、東陽テクニカのスポーツ科学実験と情報系学会での経験をもとに実現されています。
実験2:一般道路での車両に「閉じた」計測
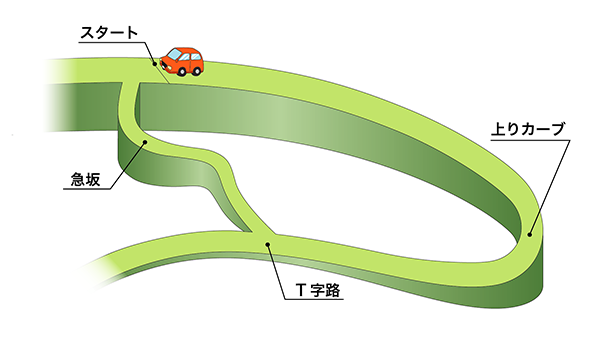
実験2では、車載に搭載したセンサのみで、車両の慣性と特性を計測します。スタート地点でアイドリング停車している車は、走り出すとすぐに左折、急坂を蛇行しながら下ります。T字路でいったん停車してから左折して上りカーブで加速しつつスタート点へ戻ります。
実験1では、乗用車が走行中に歩行者が道路を横断します。この歩行者を運転者が認識した際どのようなペダル操作をして車速を制御するかを、歩行者、車両、運転者の3対象で同期計測する実験です。
実験2では、ループしている標高差25m程度の一般道を走行して、GPS、慣性計測、運転者挙動の3種を測りました。GPSはGNSS(全球測位衛星システム)化して改良が進んでいますが、電波障害に対してはいまだに脆弱で、慣性航法との併用が必要です。一方で、慣性航法のMEMS(微小機械電機システム)センサは積分誤差が大きいので単体では実用にはならないという認識が一般的です。この点の改善実験を試みました。
※実験場所は、一般道と市有地であり許可を得たうえで安全に配慮して実験を実施しています。
実用計測問題として重要なことがいくつかあります。
- 歩行者、運転者、自動車の計測同期がとれていること
- 歩行者計測装置の操作に追加人員が必要ないこと
- 計測後にそれぞれのデータが連動して再生でき、後処理も可能なこと
- 計測自体は安全で法規や倫理上の逸脱がないこと
これらを満たす実験を実施することができました。結果として、主な目的は十分に達成できたと言えます。
次回から2回に分けて、二つの実験の内容について紹介します。
【これからの自動車計測はどこへ行くシリーズ】 技術コラム
- これからの自動車計測はどこへ行く [1/3]
自動運転実現のために今後必要となる計測手法を探る!歩行者、運転者、そして自動車の挙動を測ることによって、車両自体が制御を行うより高度な自動運転、より安全で能率的な輸送システムの実現に役立ちます。計測の専門家集団、東陽テクニカだからこそできる実験に挑戦しました。3回連載の第1回目です。 - これからの自動車計測はどこへ行く [2/3]
自動運転実現のために今後必要となる計測手法を探る!歩行者、運転者、そして自動車の挙動を同じ時間軸の中で測ることによって、車両自体が制御を行うより高度な自動運転、より安全で能率的な輸送システムの実現に役立ちます。計測の専門家集団、東陽テクニカだからこそできる実験に挑戦しました。 - これからの自動車計測はどこへ行く [3/3]
自動運転実現のために今後必要となる計測手法を探る!3回連載の第3回目は、一般道路での車両に「閉じた」計測実験レポートです。一般道路の周回路を実際にドライブしてデータを取りました。車両の運動(運動、速度、加速度)をIMU(慣性計測装置)を使って計測して求める方法を紹介します。


本記事に掲載の計測試験に
ご興味がございましたら
お気軽にお問い合わせください
