現実とシミュレーションを繋ぐ
~ラボで自動運転を再現~
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です

はじめに
近年の自動車では多くのデバイスが電子制御されており、さらに、各デバイス間で協調制御を行っているため、制御はより複雑になっています。自動車開発では機能性や安全性を評価する必要がありますが、テスト工数は年々膨大になっており、いかに効率よく評価できるかが課題となっています。
開発に時間がかかる要因はいくつかありますが、その一つに完成車での評価があります。実路面で走行試験を行うため天候や交通状況の影響を受けてしまい、試験を行うまでに多大な工数を必要とする場合もあります。SILS(Software In the Loop Simulation、ソフトウェアを用いたシミュレーション)やHILS(Hardware In the Loop Simulation、実際のハードウェアも用いたシミュレーション)、各コンポーネントベンチなど評価を行うツールは充実してきているものの、完成車での評価の多くはテストコースなどで行われているのが現状です。シミュレーションやコンポーネント評価の精度を高めていくことも必要ですが、車両全体の協調制御の機能性・安全性の確認を行うためには、完成車での評価が不可欠です。自動運転車の評価でも同じことが言えます。
完成車評価を効率化 ―DMTSとは
東陽テクニカ技術研究所はこれらの課題に対応すべく、実路走行試験を台上化し、実験室(ラボ)内で、完成車を使った実路走行相当の試験ができるDMTS(Driving & Motion Test System)を構築しました。まずは、このDMTSの構成についてご紹介します。
DMTSは、操舵のできるハブダイナモメーターをハードウェア部として、評価の用途に応じて周囲の環境をソフトウェア部として再現します。完成車の試験を台上化することで天候などの影響を受けず、試験の再現性を確保でき、例えば膨大な工数を要する屋外での“適合業務”の一部を短時間でこなすことができるようになります。また、緊急回避のような危険性が高い試験や、渋滞時の交差点への進入のような、実路で状況を再現するのが難しいシナリオでの評価にも対応できます。DMTSは自動車開発の新たな評価手法である実路走行の台上再現“Road to Lab”を実現します。
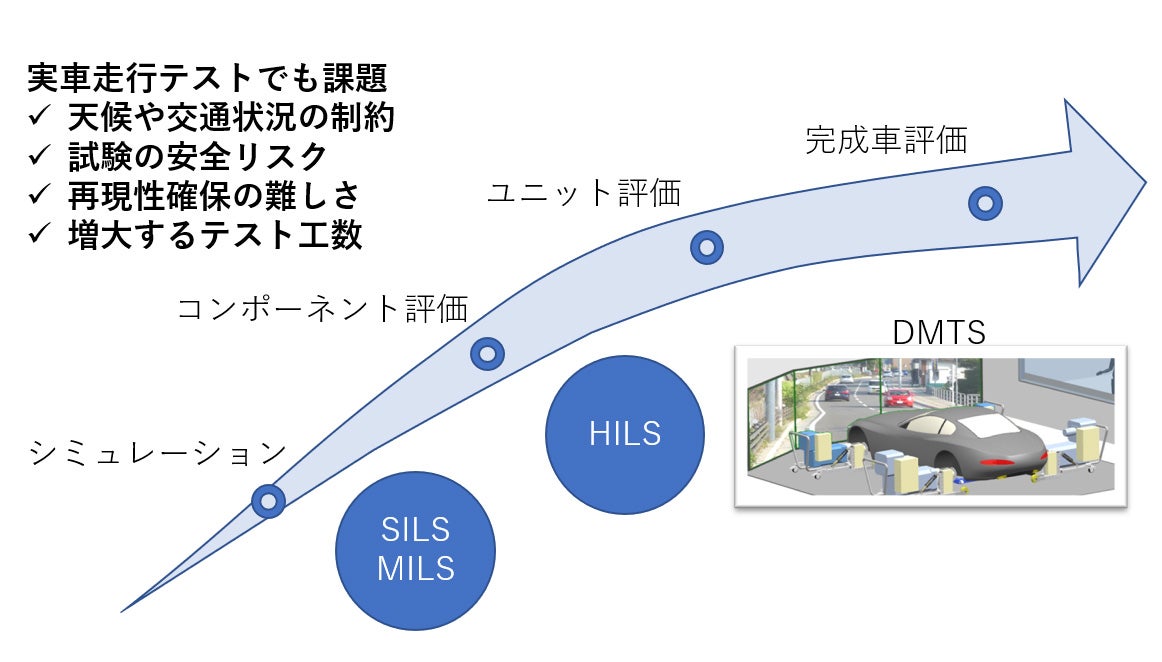
図1:自動車開発における評価工程
DMTSの紹介動画(英語)
https://www.youtube.com/watch?v=iaKdBKodBNQ
DMTSでのシミュレーション試験
DMTSでは操舵のできる4輪独立式ハブダイナモメーターを使用するため、ハンドル操作も含めた試験ができますが、実際の車体の運動(ヨー・ロール回転や横加速)は発生しません。そこでMechanical Simulation社製「CarSim」やIPG Automotive社製「CarMaker」などに代表される車両運動シミュレーターとHILSを使って連携し、リアルタイムにヨー・ロール回転や横加速信号をシミュレーター上で計算することで実路走行を模擬します。
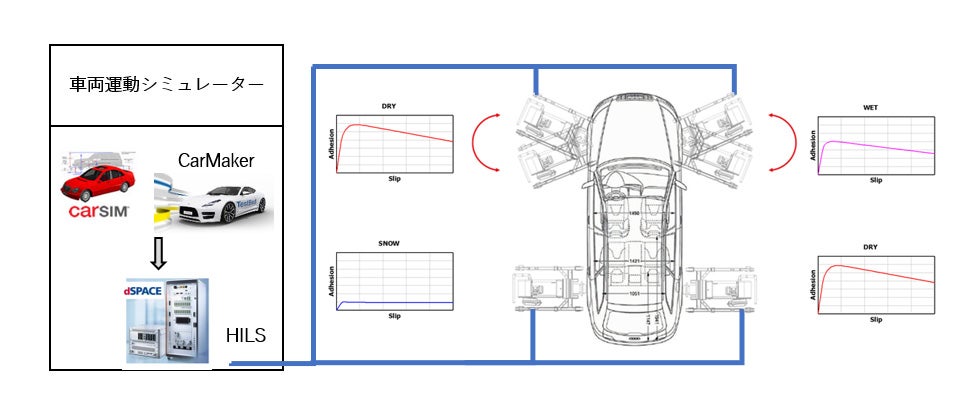
図2:車両運動シミュレーターとHILSとの連携
例えば、雪道などスリップし易い路面状況を4輪独立に再現します。カーブを走行中に1輪だけが凍結路面を通過した場合に車体は横滑りしますが、この時の車両挙動を各デバイスのECU(Electronic Control Unit)へ入力することで、実車両を使って車両走行安定装置などのデバイスをハブダイナモメーター上で評価できます。また、EV(電気自動車)は走行可能距離や電費が課題とされていますが、実燃・電費測定のために山岳地帯の道路を模擬したり、交通流シミュレーターを連携させて市街地の渋滞を模擬したりもできます。
リアルな景色を再現「Real Video Drive Player」
ハブダイナモメーター上の車両はドライビングロボットで操作することもできますし、ドライバーが自ら運転することもできます。ドライバーが運転して実路走行を模擬する場合、ステアリングを操舵するためには映像情報が不可欠です。さまざまなドライビングシミュレーターを評価しましたが、そのほとんどの映像がCG(コンピュータグラフィックス)で製作されているため、現実感が得られません。CGに高精度映像品質を追求すると、多大な製作期間と製作コストが発生します。これでは、実路で発生した現象をタイムリーに再現することはできません。そこで、低コストで短納期を実現する、実写映像再生ソフトウェア「Real Video Drive Player」を開発しました。
「Real Video Drive Player」は360°カメラで一度だけ実路の映像を撮影し、2D情報から3D空間を仮想的に作り出すことで車速やステアリング操舵角に連動して自由に加速や減速、車線変更など3D空間内を移動できます。CGで作成された映像に比べて圧倒的にリアルな状況を作り出すことができます。「CarSim」や「CarMaker」などの車両運動シミュレーターを合わせて使用することによって、(カーブを曲がると車両が傾く)ロールや、(ブレーキを踏むと前輪が沈み込む)ピッチなどの挙動も「Real Video Drive Player」の映像と連動させることができ、ドライバーが実際の運転を再現する環境を提供できます。

図3:撮影時の映像(上)と撮影映像を視点移動させた映像(下)
「Real Video Drive Player」ソフトウェア&専用撮影・映像加工サービスの紹介動画
https://www.youtube.com/watch?v=35SPLjF3YAY
「CASE」への対応―DMTSによる自動運転車の評価
自動車業界は「100年に一度の変革期」の真っただ中にあると言われ、キーワードとして「CASE」という言葉が使われています。「Connected(IoT化)」「Autonomous(自動運転化)」「Shared & Services(カーシェアリングの浸透)」「Electric(電気自動車の浸透)」という変革に対する四大潮流の頭文字をとったものです。
ここからは、DMTSのソフトウェア部のCASE、特に「Autonomous(自動運転化)」への対応について紹介します。
自動運転車をラボで評価するためには、ここまで紹介してきたような台上システムに加えて、自車の動作、構造物や天候などの周囲環境とその環境下で取得されるセンサーデータ、他の交通参加者なども模擬する必要があります。そこでDMTSでは、これら環境の模擬を実現するために、さまざまなシミュレーションツールを連携して動作させる、いわゆる“エコシステム”(別々のツールを共存させ効果的に動かすしくみ)を構築し、ソフトウェアとして実装しました。以下ではDMTSで使用しているエコシステムの構成や、エコシステムを構築している背景などについて説明します。
自動運転車のシミュレーター「CARLA」
DMTSのエコシステムには近年、研究が急速に進む自動運転車シミュレーターの一つである「CARLA」を取り入れています。「CARLA」はオープンソースとして開発されており、自動車のダイナミクスを決定するプラントモデルや、自動運転車の実現に必須なLiDAR(Light Detection and Ranging)、多視点カメラ、深度カメラなどのセンサー群を利用することができます。他にも他車両、歩行者、信号機など、交通シナリオの作成などシミュレーターに必要な要素も含まれています。

図4:DMTSエコシステムを構成する要素
「CARLA」はUnreal Engineというゲーミングエンジンを使用しており、他のシミュレーターにはない、写実的で精巧な3Dモデルを作成することが可能で、カメラやLiDARといったセンサーのシミュレーションは得意分野です。また、天候や時間など、シミュレーション空間を変化させることも容易にできます。基本的には、「CARLA」のみで自動運転車の開発や検証が可能な機能が含まれています。

図5:「CARLA」のシミュレーション空間変化の様子 昼間晴天(左)、夜間(中央)、雨天(右)
しかしながら、「CARLA」のみを自動運転車の開発や検証に使用するには、いくつかの課題があります。例えば、「CARLA」には自車のダイナミクスを決定するモデルが含まれていますが、そのモデルは「CarMaker」や「CarSim」などの車両運動シミュレーターと比較すると、サスペンションのモデルなどに起因する車両姿勢などの正確さの面で劣っています。また、「CARLA」では、前方車との車間や、レーンチェンジの可否などのパラメータを設定することで交通参加者を制御することができますが、これらは、ユーザーがプログラミング(C++、またはPython)をすることで初めて使用可能になるため、使い勝手がよくありません。東陽テクニカが“エコシステム”を構築したのは、こうした「CARLA」単体でのシミュレーションでの制約を解消するためでもあったのです。
「CARLA」と車両運動・交通流シミュレーターとの連携
「CARLA」と各シミュレーターとの連携について説明します。まず自車のダイナミクスに関しては、「CarMaker」、「CarSim」などの車両運動シミュレーターで計算を行います。そして計算された自車の位置や速度、姿勢のデータを「CARLA」に送ります。すると車両の姿勢について正確なシミュレーションが行えるようになり、急ブレーキをかけたときのノーズダイブのような車両姿勢の変化によるセンサーの挙動や、路面形状計測システム「XenoTrack」(ベルギーXenomatiX社製)で測定した路面形状データを利用して車体の振動なども正確にシミュレーションすることができるようになります。
他の交通参加者に関しては「SUMO」(=Simulation of Urban Mobility、ドイツ航空宇宙センター(DLR)が開発しているオープンソースの交通流シミュレーター)、「PTV Vissim」(ドイツPTV社製) などの交通流シミュレーターで計算を行います。これによりユーザーはプログラミングすることなく、「CARLA」上に多数の交通参加者を配置し、歩行者、渋滞などの交通状況を簡単にシミュレーションすることができます。これらは、今後開発、検証のターゲットになるであろう市街地でのシミュレーションに活用できます。
また、このエコシステムはPCベースでのMILS (Model In the Loop Simulation)やSILS、あるいは各種HILSと組み合わせて使用することも可能です。一例として東陽テクニカの扱うターゲットシミュレータ「ASGARD」シリーズ(スウェーデンUniqueSec社製)や、車両運動シミュレーターとしてHILS上で動作している「CarSim」や「CarMaker」と連携させることが可能です。
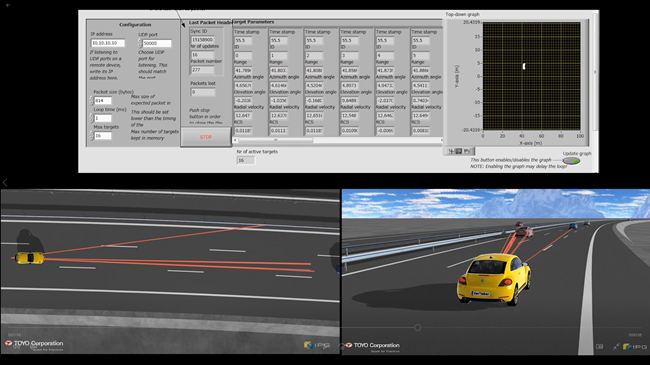
ミリ波レーダHILSソリューション UniqueSec「ASGARD1」とIPG Automotive「CarMaker」連携の紹介動画
https://www.youtube.com/watch?v=hPabYpxiJC4
このように、エコシステムを使用することで、既存のモデルやシナリオを利用でき、さらに今まで以上に精細な環境でシミュレーションを行うことが可能になります。精巧なモデル構築は、一般にレーザー計測などを行うため、非常に高いコストと長い製作期間が必要ですが、「Real Video Drive Player」の360°カメラ映像を活用して道路映像の生成(岩根研究所製「Ortho Creator」)や、建物全般の3Dモデル構築(岩根研究所製「CVCG Modeler」)をするため、低コスト・短期間での構築が実現できます。

当社の実験設備テクニカルリサーチラボ付近をモデル化した動画
https://www.youtube.com/watch?v=t5ySX_9jrPM
また別の取り組みとして、「Real Video Drive Player」を拡張して、実写映像とCGを組み合わせ、映像に3Dモデルを挿入することや、3Dモデルを外部から制御することができるようにしました。これによりEuroNCAP(=European New Car Assessment Programme、ヨーロッパで実施されている自動車安全テスト)やADAS(先進運転支援システム)試験などにおいて、交差点で横から人が飛び出したり、追い越し車両が急に割り込んだりする状況を作り出すことができます。

人が飛び出してくる状況を作り出した動画
https://www.youtube.com/watch?v=8vv1dXyFUXo
おわりに
DMTSはエコシステムですので、必要な機能だけ抽出して、お客様の既存のシステムと組み合わせることもできます。すでに構築した資産を活用して、システムの性能向上をサポートします。
東陽テクニカは、手間のかかる実路走行試験から“Road to Lab”への置き換えを実現できる環境を構築することで、自動運転車を含む先進自動車開発のスピードアップに貢献してまいります。
著者紹介

株式会社東陽テクニカ 技術研究所 部長
木村 尚史
1998年 東陽テクニカ入社
開発部、技術部を経て技術研究所にて自動車の計測・実験環境開発に従事。
製品・ソリューション紹介

自動運転/ADAS関連ツール
自動運転/ADAS評価用データロガーをはじめ、自動運転/ADAS搭載車を評価するための各種開発・評価ツールを扱っております。

True Sim
※2021年12月に、製品名を「Real Video Drive Player」から変更しました。
「True Sim」は360度カメラで撮影した走行映像に対して特徴点などの各種情報を抽出し、撮影時のカメラ視点/角度の映像だけでなく、撮影時とは異なるカメラ視点/角度からの映像に変換して再生することができる映像再生ソフトウェアです。

XenoTrack-RT
(路面形状計測システム)
XenoTrackは、LiDARを用いて路面形状を計測するシステムです。