各種自動車のRTK-GPS制御ロボットによる完全自動走行試験が可能
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です

HI-TEC社(伊) ドライビングロボット NaviControlはハンドル/ブレーキ/アクセル/ギアを全自動/半自動で各種実走行試験を無人または遠隔操作で実施することが可能です。極めて高精度かつ高再現性の走行を実現します。また各ロボットは脱着可能で簡単に各種自動車に取り付けられます。
NaviContorolシステムはRTK-GPSを装備することで極めて高精度かつ再現性の高い走行を実現します。完全な無人走行も可能ですので、急ブレーキ/衝突/横転/ポッドテスト等をドライバーを危険にさらすことなく行えます。再現性もRTK-GPS方式を使用しているので誤差はわずか数cm です。
1.NaviControlのシステム概念
この製品はReal Time Kinematic GPS (RTK-GPS;干渉測位)方式と慣性計測ユニット( IMU;3軸ジャイロ+3軸加速度計)制御を使用し、車を走行させたい軌跡を車速制御して完全無人自動走行ができます。カーナビ等で採用されている単独測位(位置精度は3m 程度)とは違い、GPS測位の中で最も精度の良い方法で、cm単位の位置精度といわれるRTK-GPS方式では、走行させる車のGPSアンテナと地上に設置した基地局のGPSアンテナ2か所の受信機で、正確な位置を搬送波の波数と位相差から検出することができます。
基地局のデータは通常Wi-FiやLTEなどを使用し走行車に送信されて補正されます。走行車には、IMU制御により、正確なハンドル舵角をコントロールするモータ駆動のステアリングロボットと、速度、位置をコントロールするアクセル/ブレーキロボット、ギアロボットを装着しており、その決められた軌跡を正確に走行しようとします。

システム概念図
2.NaviControlのアプリケーション
速度やマッピング(GPSによる走行コースの定義)はPCで設定します。主なアプリケーションは、操安/乗り心地テスト、高速耐久/悪路耐久、急ブレーキ/フィッシュフック、衝突/ポッドテスト等の高精度/高再現性や安全性を重視する試験全般です。また、興味深いアプリケーションとして海外の軍隊等での危険地帯内の先導車コントロール、爆発物等の危険物処理、無人監視用巡回車としても使われています。
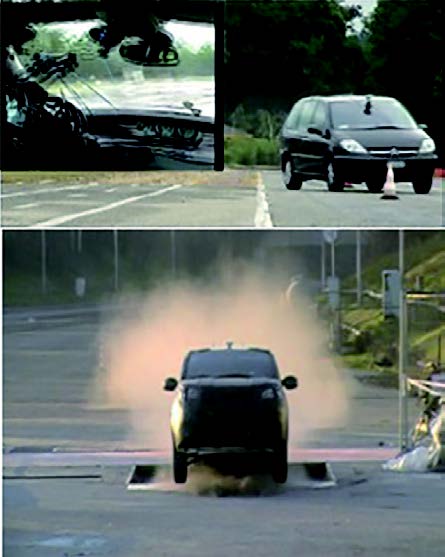
無人スラローム走行(上)とポッドテスト(下)
3.NaviControlの安全性
自動運転ロボットの安全性はとても重要です。この製品で試験する主なフィールドは、自動車メーカや公共のテストコースです。無人で走行しているとはいえ、様々なトラブルによる自動車の暴走、衝突は避けるべき重大事項です。本ロボットは設定ルートから規定値を逸脱すると自動的にブレーキ機能が働きます。また基地局には独立緊急ブレーキシステムを兼ね備えており、緊急時に人の判断で車を停止できます。さらに、システム電源喪失やGPS信号の一定時間以上の遮断、車両-基地局間の通信遮断等の様々な想定に基づき安全機能が働きます。
4.NaviControlの特徴
高精度・高再現性
1秒間に50回のトラッキング制御を行うことで、位置制御精度:±5cm、速度制御精度:±0.5km/h、加/減速制御精度:0.03Gを実現しています。
各ロボットの取り付けが簡単
見落としがちですが、このような脱着可能なロボットで重要事項の一つに各ロボットの取り付け時間を含めたセットアップ時間があります。製品によってはロボットの取り付け作業で約1日かかり、重要な実走行試験に支障をきたすのでは効率が悪すぎます。すべてのロボットは小型・軽量でねじ締めにより簡単に取り付けられます。特にステアリングロボットは約6kg と軽量化に成功し、装着時間は経験にもよりますがすべてのセットアップを含めても約2時間以内です。

ステアリングロボット

アクセル/ブレーキロボット

ギアロボット
車載側のシステムの堅牢さ
当然ですがこのシステムは、急ブレーキ/衝突/横転/ポッドテストのような過酷な試験を想定しており、とても堅牢に設計されています。インパクトで100G、連続で5G以下と高耐久G性能を兼ね備えています。
ハードウェア・ソフトウェア特注に柔軟に対応
この製品の製造元のイタリアHI-TEC社は本来システムインテグレータ会社です。自動車のギアシフトには様々な形状があり、ロック解除ボタンの位置も各車種により異なるため、それに合わせたギアロボットが必要ですが、このような特注ハードウェアも製作可能です。またソフトウェアに関しても画面表示や特別なシーケンスの特注にも対応可能です。
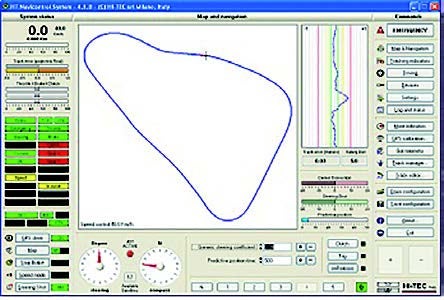
車両の軌跡設定画面
5.ご発注までの流れ
この製品は、性格上すべてのお客様がデモンストレーションを要求されます。事前に打ち合わせをさせていただき、ご要望のテストパターン(スラローム走行、定常円旋回、ポッドテスト等)や計測パラメータ(加速度、振動等)を決定します。次に、お客様または日本自動車研究所(http://www.jari.or.jp/)等の貸し出し可能なテストコースをスケジューリングしていただき、デモンストレーションを行わせていただきます。


筆者紹介

株式会社東陽テクニカ 営業第2部
大内 聖一郎
1986年東陽テクニカ入社。基本物性計測器やモータ計測センサ等の営業を経て、現在はドライビングロボットの営業に従事。