マイクロ・ナノサット地上局
アイデア豊富な小型衛星ビジネスを支えるアンテナ地上システム
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です
- 目次
様々なアンテナ地上システム
1957年当時ソ連のスプートニク計画により初めての人工衛星が打ち上げられ、活発な宇宙産業が幕を開け、衛星システムが構築されました。衛星システムを大別すると衛星本体を意味する「衛星系」と衛星と通信する地上設備の「地上局系」の二つに分けられ、現在でもその概要には変化がありません。その地上設備には、アップリンク(衛星を制御するため、地上から衛星への信号を送る)とダウンリンク(衛星から地上へ信号を送る)の二つの機能が備わり、衛星系には、地上から空の一点に静止しているかのように見える静止衛星と常に動きのある軌道衛星が存在するため、地上局は衛星方向に照準を合わせるための姿勢制御装置を必要とします。
地上局は、直径1m程度のパラボラアンテナを用いたシステムから、60mを超える高性能パラボラアンテナを用いたシステムまで多種多様な地上局があります。アンテナの大きさは、衛星の利用目的(ミッション)によって決定されます。
衛星開発は高性能・高精度・多機能を必要としたので、大型衛星の開発が進みました。一方で、予算・開発期間・多種多様なミッション要求から小型衛星(ここでは50kg以下のマイクロサットやナノサットを指します)計画が多く存在し、小型衛星にあわせた地上局が必要となっています。衛星用地上局は小型衛星を追跡し、衛星からのデータを取得して運用と管制を行うための機器から地上システムが構成されます。特に小型衛星用地球局は直径2m~4mのパラボラアンテナを用いた地上システムとなります。
確かな地上局は小型衛星システムの成功に結びつくと言っても過言ではありません。
多国籍システム
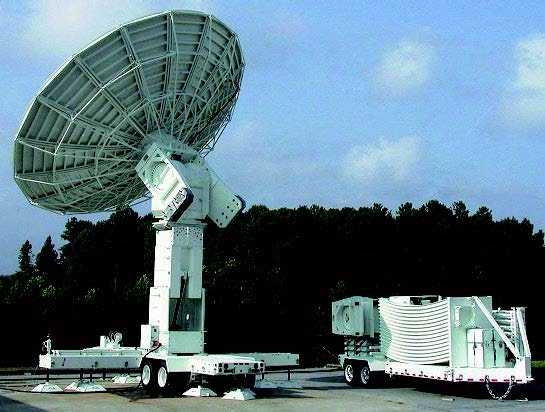
小型衛星用のアンテナ地上システム(図1参照)は小型衛星のミッションにより決定され、衛星通信用回線設計をもとにアンテナ地上システムの主設計を行います。主なアンテナ地上システムは、パラボラアンテナ・送受信フィード・衛星通信装置・追跡装置(トラッキング装置)・データストレージ・運用ソフトウェア・遠隔制御などのサブシステムから構成され、言うなれば「多国籍システム」といえるでしょう。言い換えると、アンテナ地上システムは高周波技術・アンテナ工学・通信・機械制御・ソフトウェア・ネットワーク通信などの数多くの分野に渡る技術を必要とし、豊富で幅広い知識と経験により達成できます。当社は多分野の社内スペシャリストや海外・国内の協力会社と連携し、システム設計から運用支援まで幅広い活動を行い、経験や実績を蓄積しています。
以下に、アンテナ地上システムの特色と課題について考察し、当社アンテナ地上システムをご紹介します。
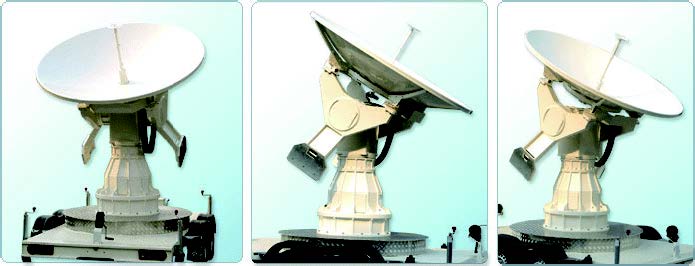
図1 小型衛星用アンテナ地上システム
1)トラッキング装置とアンテナサイズ
アンテナ地上システムの価格を決定する大きな要因はトラッキング装置です。アンテナ地上システムの全価格の中でトラッキング装置の価格割合は50%を超えます。
そのため、トラッキング装置を小型化するためにトラッキング装置にマウントされるパラボラアンテナの大きさは極力小さくしなければなりません。また、パラボラアンテナは常に風圧を受ける屋外環境に晒されるため、風圧力を考慮しなければなりません。
一方で、衛星からの大容量データを受信するためには大型なパラボラアンテナを必要とし、トラッキング装置の大きさとパラボラアンテナサイズは性能と金額の狭間を揺れ動きながら選択することになります。
2)理想的アンテナのアライメント
衛星と通信するため地上側の最終デバイスがアンテナです。小型衛星用のアンテナはパラボラアンテナが用いられ、パラボラアンテナには送受信用フィードがマウントされます。小型衛星のミッションを考えると直径2~4mのパラボラアンテナが必要となり、理想的なアライメント(パラボラアンテナの焦点に送受信フィードの給電点を一致させること)により最小化されたアンテナとなります。
ここで重要なのが「アライメント」と「アンテナ評価」です。アンテナ評価のため、一般的にはアンテナテストレンジと呼ばれる専用試験場を利用します。アンテナ評価のための試験場の大きさは、アンテナサイズと測定周波数により決まります。Xバンドの周波数(衛星通信の場合、8.0~8.4GHz)で直径4mパラボラアンテナを評価するためには約900mの試験場が必要です。加えて、最近の電波環境により屋外で計測できる試験場は乏しくなりました。
そこで登場する試験場がニアフィールドと呼ばれる室内試験設備です。韓国MTG社はアンテナ製造とともに自社のニアフィールド計測システムで計測しながらアライメント調整が実現できます。4mのパラボラアンテナの評価では少なくとも5mを超えるスキャンエリアを必要とし、MTG社では5m×5mのニアフィールドスキャナ(図2参照)を有し、十分なアンテナの特性評価が可能です。
また、ニアフィールド計測(図3参照)はアンテナの開口面分布の計測も可能であり、正確なアライメント調整を可能にします。

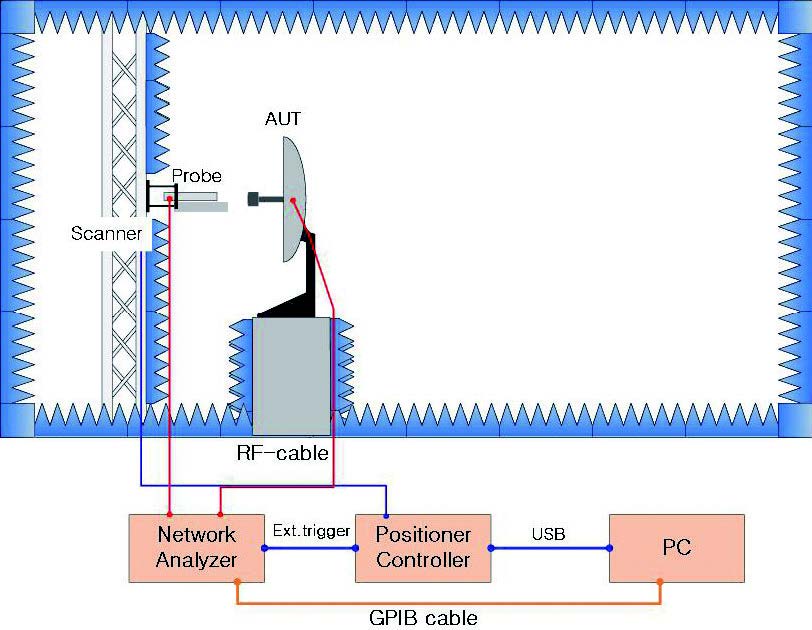
図2 5m×5mニアフィールドスキャナ
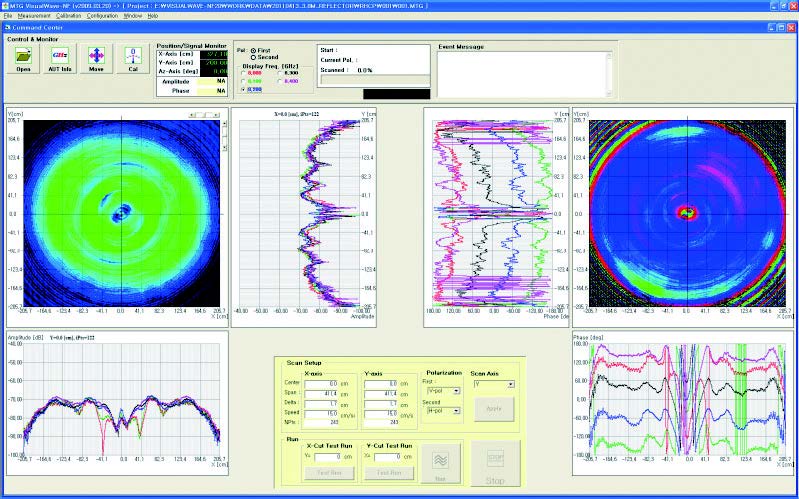
図3 ニアフィールド計測データ
3)豊富な経験と知識による姿勢制御装置の選択
衛星用トラッキング装置はパラボラアンテナの姿勢制御部(ペデスタルやポジショナと呼ぶ)と制御コントローラ(アンテナコントロールユニット=ACU)から構成されます。衛星軌道やミッションによってペデスタルのコンフィグレーションを選択します。どのようなコンフィグレーションを選択するかはアンテナ地上システムの設計者の知識と経験によるところが大きく、安定した衛星通信を行ううえでは重要な選択となります。
ペデスタルサイズに直結するモータトルクは、アンテナにかかる風圧力がトラッキング性能へどのように影響するか予測して決定します。
ペデスタルのひとつの考察として衛星方向を考えます。仰角の低い位置でデータリンクが多い場合はAZ/EL形状のペデスタルを、天頂付近で多い場合はX-Y形状のペデスタルを選択するのが一般的です(図4参照)。ともに、要求されるペデスタルの最大可動スピードを把握して選定します。

図4 AZ/EL形状ペデスタル(左)とX-Y形状ペデスタル(右)
一方でペデスタルは、パラボラアンテナのビーム幅に関係したポインティングが十分でなければなりません。Xバンドで直径4mパラボラアンテナの場合、3dBビーム幅は0.6度です。ハイスピードな制御と高精度なポインティングを必要とする高品位なサーボコントロールにより実現します。
当社エンジニアはペデスタル形状・ペデスタルサイズ・ポインティング精度など様々な観点と予算の両面を考慮してシステム設計を行います。
4)多機能なアンテナコントロールユニット
アンテナコントロールユニット、通称ACUは地上局運用者のインターフェイスです。通常、地上局運用者はパラボラアンテナなどの屋外設備と離れた部屋、または、建物など遠隔地から、イーサネットなどを経由して制御と監視を行います。ときには、違う都市や他国からのコントロールを行います。誰でもが容易に理解できる操作性であり、確実な制御を要求されます。
また、スケジュールを管理する統一化されたファイルシステムからの制御や監視ができることが望まれます。
5)アナログ信号の伝送
衛星との通信はアンテナから電波による送受信で交信します。信号は、アンテナと地上局制御室で接続されます。ここで用いられる信号は高周波(RF)信号でアンテナと制御室の距離が長ければ信号の損失(ロス)となります。信号ロスをなくすための装置として当社RF-光コンバータ(図5参照)があります。RF-光コンバータは、特殊な素材を利用して光を高周波信号でアナログ変調するためケーブルによる信号ロスを考える必要がありません。言い換えると、高額な送受信装置を屋外の過酷な環境下に設置する必要がなくなり、周囲温度に敏感な高周波機器はすべて室内の安定した環境に設置できます。送受信装置の制御やモニタ、そして、メンテナンス性に適した配置を実現します。
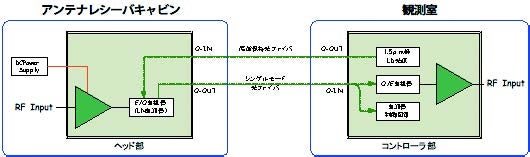
図5 RF-光コンバータの構造
6)データのデジタル化
衛星からのデータは高周波信号を量子化と符号化によりデジタルデータに変換します。データの量子化の前段では、データ処理が容易な周波数へ変換する(ダウンコンバート)のが一般的です。しかし、いくつものデメリットがあります。ダウンコンバータを過酷な屋外環境下に設置しなければならないこと、ローカルオシレータが温度変化に敏感に反応すること、そして、高額なアナログデバイスであるローカルオシレータを必要とすることなどがあります。当社デジタル受信機(図6参照)は高周波特性に優れたA/Dコンバータを用いることで温度に敏感なローカルオシレータを排除しました。デジタル受信機は、周波数変換がないのでダウンコンバータを利用するアンテナ地上システムよりも設備構成と設備配置が簡略化できます。また、ネットワークに直接接続できるため、ネットワークの親和性も向上します。加えて、FPGAの採用により数々の仕様の異なる小型衛星の要求に迅速に対応できる装置となります。
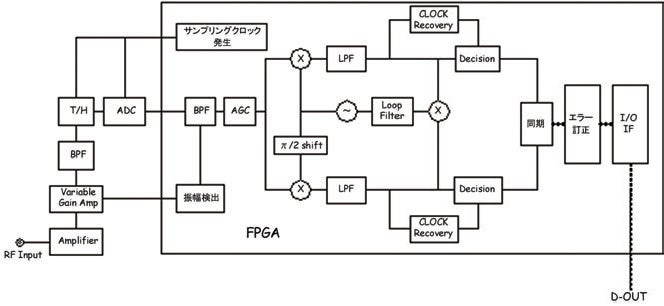
図6 デジタル受信機の構造
7)遠隔制御とメンテナンス
アンテナ地上システムは、トラッキング装置制御の機械制御、デジタル受信機などの機器制御、データストレージ制御、通信制御、遠隔制御などなどいくつもの制御を伴います。オペレータはすべての制御を把握して衛星通信を行います。オペレータの負担を軽減するための操作ソフトウェア(図7参照)は、衛星の「可視」状態となる時刻を計算し、トラッキング装置を自動動作させることができます。また、衛星とのデータリンク前に、アンテナ地上システムが満足に動作することを確認するアプリケーションも含まれることが望まれます。
アンテナ地上システムは機械構造物であるペデスタルを含みますので定期的なメンテナンスを行うことで、システムの寿命と安定した運用が約束されます。容易なメンテナンス性は、システム管理者やオペレータにとって扱いやすいシステムとなります。
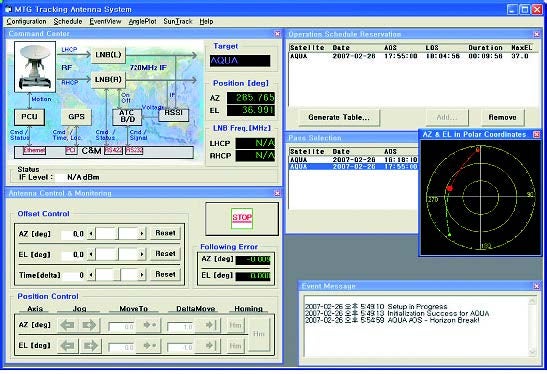
図7 アンテナ地上システムの操作ソフトウェア
将来のアンテナ地上システム
遠隔制御を伴うアンテナ地上システムは、最近のグローバルでハイスピードなネットワークの普及とともに一層の遠隔制御化が進みます。協力関係にある地上局のアンテナ地上システムを借用して小型衛星制御を行うことになります。また、小型衛星から得られるデータやコンテンツは小型衛星管理者だけでなく、一般消費者へインターネットを経由して直接配信されるでしょう。一方で、衛星システムを悪用されないためのネットワークセキュリティを考えることで、安全で安心した小型衛星ビジネスが成り立ちます。
多種多様なエンジニアリングを集結したアンテナ地上局は、実績・経験・最新技術の研究など総合的な技術力がより一層要求されるシステムとなります。
筆者紹介

株式会社東陽テクニカ EMCマイクロウェーブ計測部
熊澤 寿樹
1984年入社、アンテナ特性評価の技術担当。近年ではその技術を生かしてアンテナ地上システムを担当。SKAインダストリフォーラム幹事長。