Teledyne Webb Research社製
水中グライダー の動作原理
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です
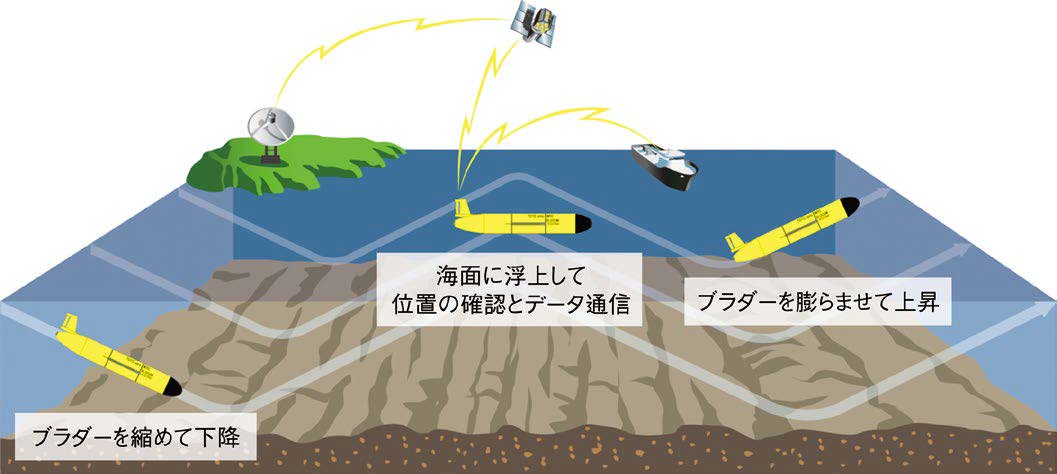
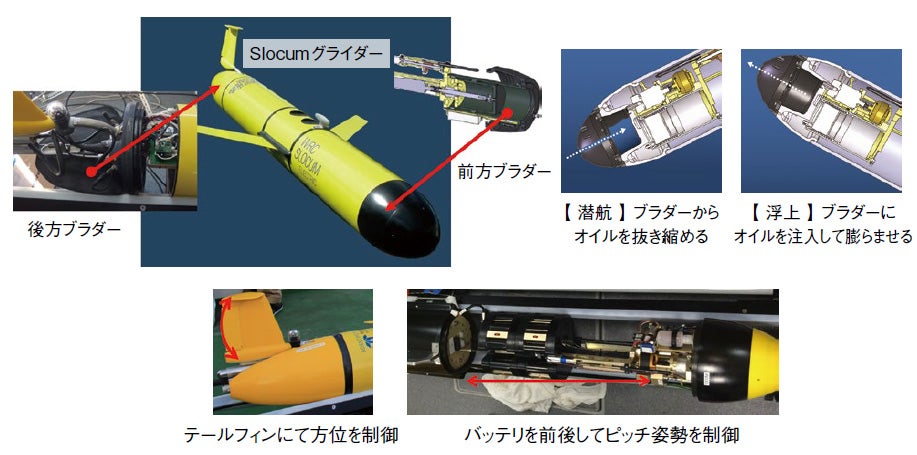
水中グライダーとは海中で自律航行し海洋の各種データを取得するロボットです。本体に装備されたブラダーと呼ばれる袋のようなものを膨らませたり縮ませたりして、グライダー全体の体積を変化させることにより本体の浮力を調整し、海底へ向かって潜航、海面に向かって浮上します。アルキメデスの原理として広く一般に知られていますが、ブラダーを膨らませるとグライダー全体の体積が大きくなり、結果、浮力が増し浮きます。逆にブラダーを縮めると体積が小さくなり、その結果、浮力も小さくなり沈みます。グライダーではこの効果を利用して、潜航・浮上を行います。潜航・浮上する際に、内部のバッテリ位置の移動とテールフィンにてグライダーの姿勢を調整し、目的の場所まで航行します。ここでは、米国Teledyne Webb Research社製Slocumグライダーについて説明します。
オペレーション
グライダーは潜航・浮上を繰り返し、オペレータによりあらかじめ指定されたウェイポイント(経由地、目的地)へ向けて移動します。海面に浮上した際に、搭載されたGNSS(全地球測位システム)を使用して現在位置の確認を行うのと同時に、海中にて取得したデータを衛星経由でデータサーバへ送信、新しいミッションの受信を行います。海面に浮上している際には、長距離無線通信にて、グライダーと母船との通信も行うことができ、必要であればデータの送信、指示、回収を行います。このようにして、グライダーは自動で海中を移動していきますが、潜航・浮上を繰り返し、その間に潜航角や方位角を変更して移動を行うため、非常に少ないエネルギーで長距離の観測が可能となります。最大6,000kmもの長距離を航行できますが、過去には大西洋を横断して観測を行った実績もあります。潜航しながら方位を調整して進むことが、空を滑空するグライダーと類似することから、このようなロボットに水中グライダーという名前が付けられました。現在では世界中で数百の水中グライダーが生産され、常時、数十台もの水中グライダーが海洋にて運用されています。
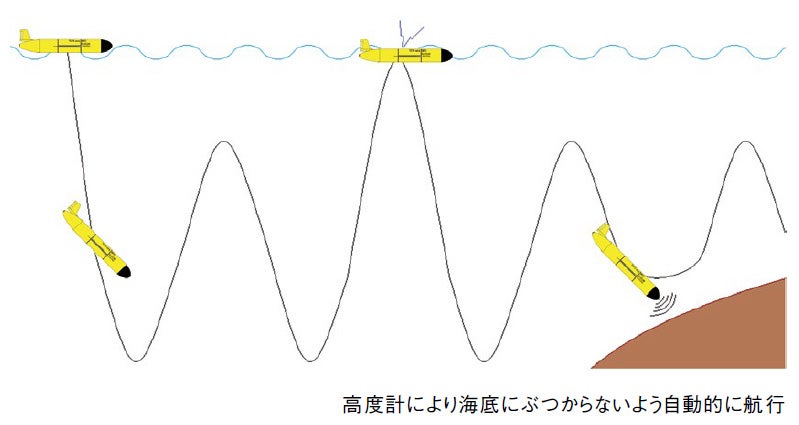
グライダーはプログラムされたミッションにより自動的に目的地まで航行します。その際、海面に浮上せず水中にて指定した水深間を往復して潜航・浮上を繰り返して進むことも可能です。このオペレーション方法により、エネルギーの更なる効率化を図ることができ、また浮上したことで発生する例えば船舶に衝突する等のリスクを回避することができます。このオペレーション方法と、全てのオペレーションが自動で遂行されることから、台風の中心、流氷の下、原子力発電所の周り等、人が行けないような危険な場所においても、問題なく観測を行うことができます。
グライダーには、CTD(電気伝導度、水温、深度)、流向流速計、放射能計等、様々なセンサ、また音響計測計、音響出力装置等を搭載することができます。また、本号で紹介している米国 Teledyne Webb Research社製Slocumグライダーでは、ほぼ全てのセンサの搭載、制御、データ収録が可能であるため、ユーザが希望する計測、運用に対して幅広く対応することができます。
まとめ
ここまで説明してきたとおり、水中グライダーを使用することにより、定常的な環境計測、極限地域での計測、ミリタリー等の幅広い用途でのオペレーションが可能となりました。加えて、人が常に張り付いてオペレーションするといった旧体制の運用方法とは違い、グライダーに対してオペレーション方法、経路、目的地、収録する計測器制御等の指示を与えることにより、自動的にグライダーが目的の場所まで移動し、収録、帰還を行います。オペレータは単に指示と、浮上した際に送信されるミッションの途中経過の情報の確認だけ行えばよいことになります。
現在、問題となっている地球的な規模での温暖化の原因・状況計測のような、超広範囲、長期間に及ぶ定常的な計測、事故等による放射線の経過計測、また機雷等が敷設されている等危険な場所での計測と、ロボットにしかできない、あるいは人の手を必要としないような計測手法には、今後も活躍の場が期待されます。