広大な海を無人ボートがゆく
-3ヶ月無補給の航海を目指して-
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です

ASV社(Autonomous Surface Vehicles Ltd)は社名が示すように自律航行ボートの専門会社です。1998年に創業した同社は2010年までは従業員2名の小さな会社でしたが、今日では英国を中心に石油産業、防衛産業向け無人ボートを60隻以上販売した、無人海洋システム業界では最も成長著しい会社です。
ASV 社の製造する無人ボート(Unmanned Surface Vehicle=USV)の特長は、造船工学の専門家がUSV 専用に設計した船体形状にあります。USV専用の船体は操縦性と安定性を両立させ、推進効率の追求により、これまで想像できなかった長期無補給運用を可能にしました。また、ロボット工学ならびに航海学の専門家による自律航行システムもASV 社製USVの特長です。
USVについて
地球の温暖化が叫ばれて、久しくなります。海水という大きな蓄熱器は温暖化の影響で暖まり、膨張し、海面水位の上昇を招きました。また海水温の上昇によって地球規模での気候変化と、それに伴う海流変化も懸念されています。いま海で何が起きているか知ることが重要だという研究者は大勢いますが、調査対象の海洋があまりにも広すぎる現実があります。
そこでいま海洋研究者の間では、限りある調査船と人的資源を有効に活用するため、無人海洋観測システムの研究、開発、利用が注目されており、海中または海底を無人で調査するためのAUV(Autonomous Underwater Vehicle)という無人潜水ロボットが、国内でも海洋研究開発機構や海上保安庁などで利用されています。
一方、海面直上の調査や水深数十mまでの海洋調査にはUSV(Unmanned Surface Vehicle)というロボットが活躍しています。しかしこれまで市販されてきたUSVはラジコンボートのような小型のものが殆どでした。これらは川や湖、港内の調査にはちょうど良い大きさと運用の簡便性を持ち合わせています。しかし搭載できる燃料や電池の制限から、せいぜい2日が連続運用の限界で、海洋調査の省力化や広域化には適さない無人システムでした。 ASV社でも短期運用目的のUSVを製造していますが、それらは軍事用途や沿岸調査用途のものです。同社が提案する海洋調査用途のUSVは、長さ2.4mの最も小型のものでも、ディーゼル発電機とその電力を蓄えるバッテリーが搭載され、電気推進器により4日間の連続航海と約450kmの航続距離を可能にしています。
このUSVはC-Statと呼ばれ、東北大学で運用中です。
新しい海洋調査ツール
さらに最近、長期/多目的運用を目指して開発されたUSVが2種類発表されました。一つはC-Worker(上記写真)で、海上石油掘削基地周辺での調査や作業支援を目的に開発されたUSVです。
長さ5.8m、総t数5tの一寸したレジャー用ボート並の船体に、13kw出力のディーゼル発電機を2基搭載し、2基の電動推進器によって巡航速度4ノットで最長30日間の連続航海が可能です。
C-Workerの特長の一つに多用途性があります。それは、船体中央に載せ替え可能な観測ユニット収納コンテナが用意されており、このコンテナにユーザーが必要とする調査機器や作業機器が収納され、USVの自律航行システムによって自動的に観測や作業が行えるようになっているのです。このユニークなペイロードシステムにより、航行性能を犠牲にすることなく、例えば海底火山活動が盛んな危険海域で海底の水中撮影や岩石の採取といった作業も可能になるのです。

(赤枠)C-Workerのペイロードシステム
もう一つのUSVは形状もユニークです。平べったい筏状の船体全面にソーラーパネルが敷き詰められ、その上にはプロペラボートのような風力発電装置が設けられています。さらにこのUSVに驚かされることは、筏を支える二つの細いフロートの中に小型のディーゼル発電機2基を納めていることです。これらのエネルギー複合生成システムと流麗なスタイルの船体がもたらす性能は、90日間/7,400kmの連続航行と4ノットの巡航速度です。

C-Enduroのソーラーパネルと風力発電ユニット
さらにこの C-Enduroと名付けられたUSVの驚くべき点は、小型のウィンチシステムが筏の下面に装備可能で、通常必要とされる海洋観測装置の取り付けが可能なことです。
最も重要な安全性
C-WorkerもC-Enduroも、長期/多目的運用の可能なUSVとして海洋調査の新しい扉を開けそうです。しかし、最もUSVに求められる性能は安全性です。何週間も、場合によっては数十日以上にもわたって貴重な観測を行ってきたUSVは、大海原を航海する船としては異例に小さな船体で、転覆や他船との衝突などの危険性が有人船に較べ遙かに大きくなっています。例えば、有人船であればどうということのない波でも、無人化された自動航行船の場合には大きな危険になります。小型船の場合、横から波に揺られることは大変危険なため船の舳先から波を受けるように操船しますが、USVのような無人船の場合はとっさに舵を切って波を正面から受けることは不可能です。そこで多くのUSVは横波を受けても転覆しにくいように重心の低い船体形状となっていますが、それでも大きな横波を受けると転覆します。ASV社のUSVは転覆しにくいように重心も低くしていますが、万が一転覆しても次の波の力を用いて自分自身で起き上がれる構造となっています。
他船との衝突を避けることも考えなくてはなりません。ASV社のUSVには操船補助を行う目的で前後左右を常時監視するカメラと、夜間航行の危険を考慮し旋回式の赤外線カメラも用意されています。またより遠方から他船接近を警戒するのに最適なレーダーも搭載可能です。これらのカメラ映像やレーダー映像はUHF通信やマイクロ波通信、VSAT方式の衛星通信などを用いて母船や陸上のコントロールステーションへ常時送られ、緊急時の遠隔操船を可能にします。また船舶同士が互いに衝突する危険を回避する手段として普及しつつあるAIS(自動船舶識別装置)を搭載していることも安全性重視の表れです。
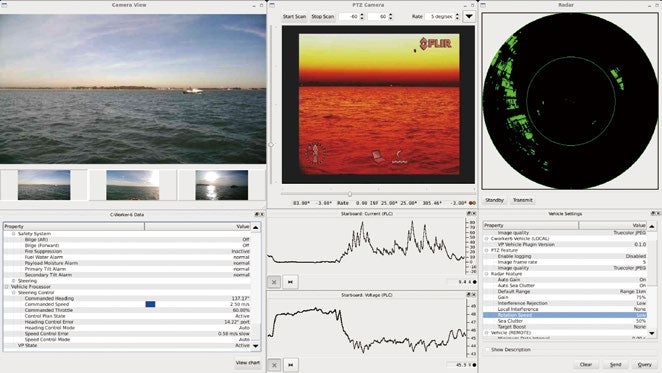
USV操船支援画面
USVの活躍する場面
USVを利用することで、これまで有人船では近寄ることが困難で観測を断念していた場所や、環境が過酷すぎて有人調査を困難にしていた海域の観測が可能になることは容易に想像できます。さらにUSVが調査船としては非常に小さく、静音化されているというメリットを生かし、通常の船では入り込めないような干潟の調査や、水中生物の発する僅かな音を記録するという調査も容易にします。
当社はUSVだけでなく、AUVや海洋グライダー、ROV(Remotely Operated Vehicle)などの水中ロボットを日本の海洋調査市場に紹介し、地球環境の改善に微力ながらもお手伝いしたいと願っています。
筆者紹介

株式会社東陽テクニカ 海洋計測部
竹内 俊英
1986年東陽テクニカ入社以来、海洋計測機器販売に従事。専門分野は測量、機械工学。