海底探査技術の国際コンペティションShell Ocean Discovery XPRIZEへの挑戦
本記事の内容は、発行日現在の情報です。
製品名や組織名など最新情報と異なる場合がございますので、あらかじめご了承ください。
PDFダウンロード
PDFをダウンロードいただくには、会員登録が必要です

海洋の探査技術コンテストとは?
我々がいる地球表面の3分の2は海に覆われていますが、その海底地形の何割が明らかになっているかご存知でしょうか?いまや宇宙にある月の表面でさえ高精度に見ることができる時代にもかかわらず、全体のごく一部しか明らかにされていません。海に関する調査や研究、また資源を利用する上で必要不可欠な情報の一つである海底地形が十分な解像で広範囲にわたって計測されていない現状は、海洋研究、海底資源研究、地震研究など多くの分野の研究や、海底インフラを整備する上で大きな問題となっています。詳細な海底地形を計測するために多くの調査機関は自律型海中ロボット(Autonomous Underwater Vehicle: AUV)を利用していますが、現在のAUVのほとんどは膨大なコストがかかる大型の支援母船を必要としており、このことが調査の妨げになっています。
このような中で、「広範囲に海底を高速かつ安価に調査したい」というニーズが世界規模で高まっています。この強いニーズを受け、石油業界大手のRoyal Dutch Shell plcがメインスポンサーとなり、無人での超広域・高速の海底調査を行う賞金総額700万ドル(日本円にすると約8億円相当)の国際コンペティション、“Shell Ocean Discovery XPRIZE”を開催することが決定されました。このShell Ocean Discovery XPRIZEの目的は、「無人探査機による超広範囲(500km2)の海底地形調査」の実現であり、Round 1とRound 2の2段階にコンペティションが分かれています。
Round 1では最大水深2,000mの海域において16時間以内に100km2以上の海底地形調査を実施し、5枚以上の海底写真の撮影を行うことが求められます。Round 2では、Round 1を通過した最大10チームにより、最大水深4,000mの海域において24時間以内に250km2以上の海底地形調査を実施し、10枚以上の海底写真の撮影が求められます。また、①無人での調査および運用、②機器の持込制限(40ftコンテナに全ての機器を収容)、③調査後48時間以内に海底地図を作成する、などのルールが掲げられています。
このコンペティションの課題およびルールは、非常にチャレンジングであると言えます。日本のAUVによる調査では現状、一度の潜航(8時間)で10km2の範囲しか海底地形を計測できません。そんな中、屋久島の面積とほぼ同程度の500km2である、これまでの50倍もの範囲を調査しなければなりません。加えて、有人の支援母船に頼らざるを得ないAUVによる海底地形調査を、持込制限がある機材のみを使って無人で行う必要があります。つまり、現在の日本の海洋調査技術を一段階も二段階も押し上げなければ、この非常に困難なミッションを達成することが難しいと考えられます。
Team KUROSHIOの取り組み
難関な国際コンペティションであるShell Ocean Discovery XPRIZEに挑戦するため、海洋研究開発機構、東京大学生産技術研究所、九州工業大学、海上・港湾・航空技術研究所、三井造船株式会社、日本海洋事業株式会社、株式会社KDDI総合研究所およびヤマハ発動機株式会社の8機関では、互いの技術を結集した共同研究チーム「Team KUROSHIO」を結成しました。

図1:九州工業大学の園田準教授がデザインした「Team KUROSHIOロゴ」

図2:Team KUROSHIOのメンバー
Team KUROSHIOは、海中ロボットの開発から運用、データ解析、通信に携わる若手の研究者や技術者を中心に、総勢約40名で構成されています。
この国際コンペティションを達成すべく、我々Team KUROSHIOは、無人の洋上中継器(Autonomous Surface Vehicle: ASV)と複数のAUVの連携による調査、という世界的にも類を見ない調査システムの開発を行っています。ルール②の持込制限からAUVの重量に制約があり、かつ大型の支援船が使えないために、1台の大型AUVで数百km2もの海底調査を達成することはできません。また、水深数千mの海底の環境を予測し、その予測結果を踏まえAUVの運動をあらかじめ設定することは難しく、限られた通信帯域で複数のセンサーと複数のAUVを連携させることは困難であるため、安定かつ確実に調査を行うことはできません。そこで我々は、1台のASVが複数のAUVの展開や航行のサポートを行い、複数のAUVが協調して海底を同時観測するシステムを提案しました(図3)。
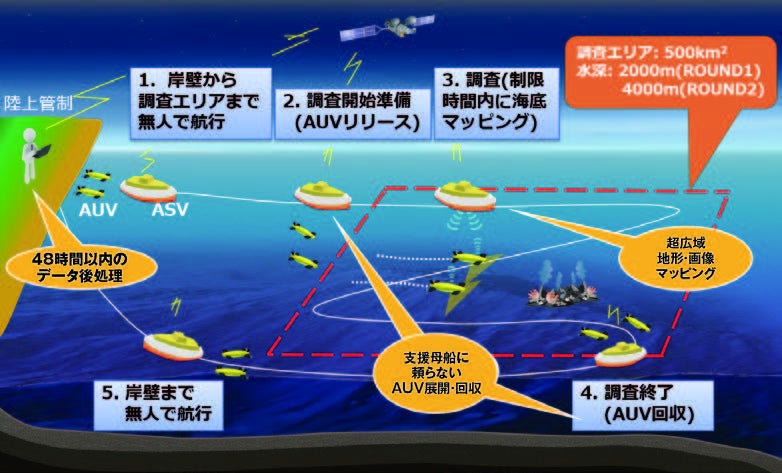
図3:Team KUROSHIO戦略案
複数のAUVを使うことで、重量やサイズに制約があるAUVでも高速で広範囲の海底調査が可能になります。またASVでAUVをサポートすることで、岸壁にいる操縦者が逐一AUVの状態を監視し、状態や周辺環境に応じてAUVに命令を送ることができるようになります。2017年2月に我々の調査システムを技術提案書として事務局に提出し、コンペティションの 第一関門である「技術提案書審査」を通過して、2018年に開催されるRound 1へ進出する21チームの一つに選ばれました。現在、提案した調査システムを現実のものにし、より確実性の高いシステムにすべく、機器の開発や調整、また実海域試験に鋭意取り組んでいる最中です1)。日本からRound 1に進出した唯一のチームであるTeam KUROSHIOは、「日本代表」であるという意気込みで、全力で邁進してまいります。
1) 2017年10月31日現在。
筆者紹介

九州工業大学 若手研究者フロンティア研究アカデミー 特任助教
西田 祐也
2012年に東京大学生産技術研究所の特任研究員に就任後、AUVやASVの開発、複数台AUVを用いた効率的な調査手法の開発に従事。2015年に九州工業大学の特任助教に就任してからは、生物捕獲AUVや3次元計測システムの研究・開発を行っている。