ViCANdo



特長
- データの再生・分析機能に加えて天候や走行パターンなど、収録したデータを走行シーン毎に自動的に分類する機能を搭載
- 収録したデータの中から試験に必要なデータだけを抽出するクラスタリング機能により、例えば車両の車線変更前後など特定の動作のデータだけを自動で抽出することが可能
- Velodyne LiDAR社、RoboSense社、Ibeo Automotiv System社など複数のLiDARベンダーからのポイントクラウド(点群)データの可視化にも対応
SDK(ソフトウェア開発キット)でLiDAR用の独自のGUIを開発することも可能 - マルチプラットフォームで動作するように設計されており、Windows、Android、Linuxなどの各種OSに標準対応
- KvaserやVectorといった車両開発において広く利用されているテストツールもサポート
CANデータベースのフォーマットとは別にKvaserおよびVectorがサポートしている形式でデータをインポート/エクスポートすることも可能
仕様
データ収録装置
ノートPC/Android端末や専用のハードウェアに加えて様々なハードウェアでViCANdoを使用可能

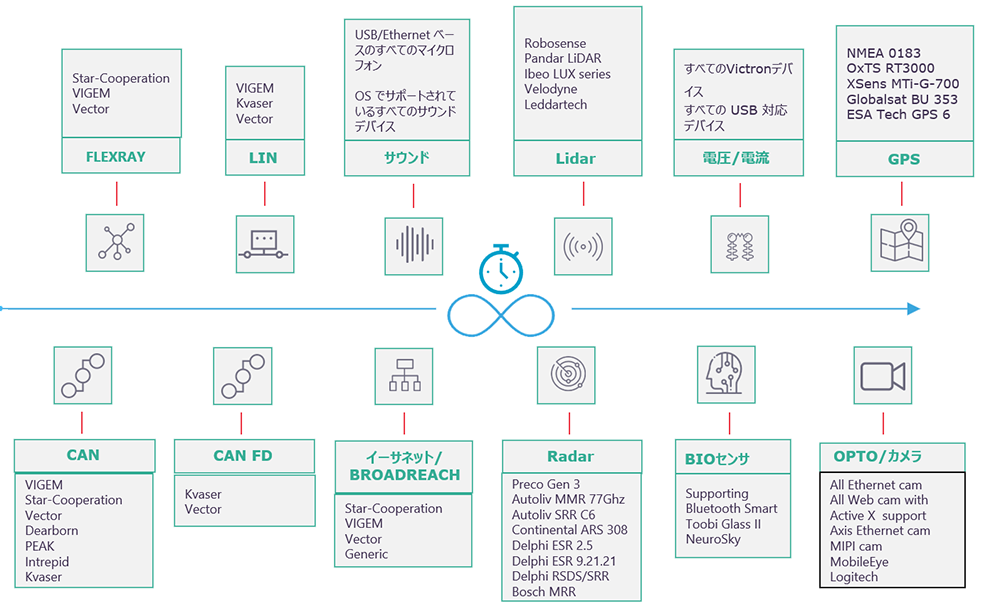
サポートされているセンサー一覧
VelodyneやRobosenseなど専用ビューワーのオプションをご用意しております。
アプリケーション
Vicanlog/Vicando共通のアプリケーション例
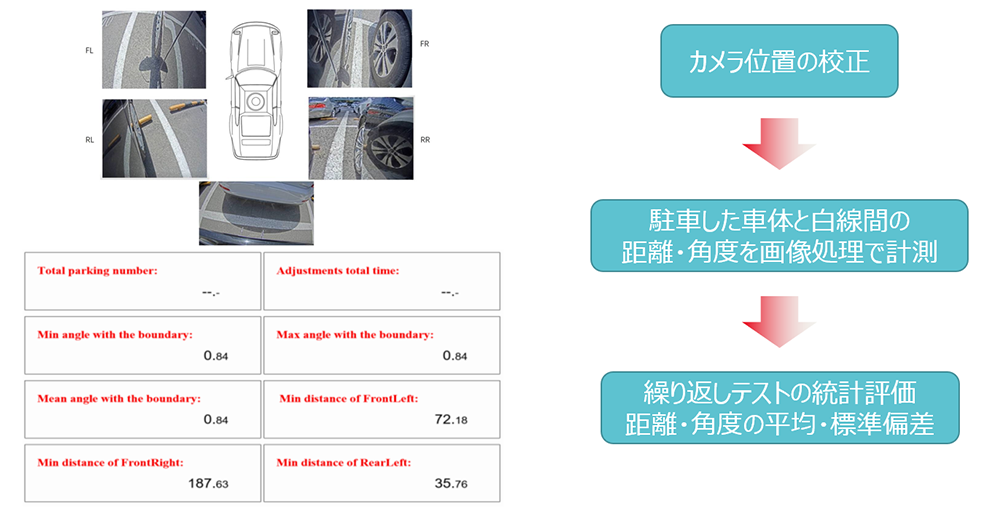
自動パーキング評価
以下は動画で紹介する予定です。
LKAS評価
自動クラスタリング機能
センサーフュージョン評価
Radarを使用した鳥瞰図