HYPACKに関する質問
16.データ処理(Data Processing)に関するFAQ
Q音線屈折処理について
レイトレーシング(音線追跡)は、マルチ‐ビーム水深測量の音線屈折を補正します。レイ・トレーシングの基本は音速度層を含むウォーターカラムを経た、音線のパスの十分な計算です。
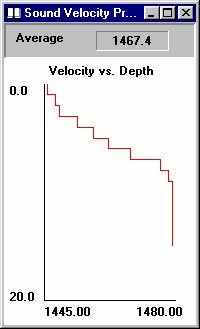
SVプロファイル
音線計算は、音速度プロファイル(ウォーターカラムにおける各層の音速度の計測)で始まる。左下で示されたプロファイルは、河口において1.5フィート位毎で計測された典型例です。
第2のプロファイル(下記、右)においては、後続する計算を簡略化するために、おおよそ3ポイントにしています。
そのテーブルは、概略のプロファイルを与える。
|
層端の深度(Feet) |
層厚–h ( Feet ) |
音速度–V (Feet/s) |
|---|---|---|
|
10 |
10 |
4730 |
|
30 |
20 |
4775 |
|
50 |
無制限 |
4793 |
最終の層厚は無制限です。測定された深さがプロファイルの限界より大きい場合、無制限に底層が伸びるように、仮定されます。
深い水域において、圧力は、支配的要素となり、そして、音速度は、深さの関数として計算されます。
音線ダイアグラム:
音線ダイアグラムは、屈折のためのパス変更を含む音線のプロファイルビューです。それらの数値は、真の測深点に通じるレイ・トレーシングに必要とされる中間計算である。
V : 層の音速度。
Beam Angle q:鉛直に対する角度
Range r:各層の進行方向の距離
Depth d:各層の鉛直方向の距離
Offset s:各層の音線の水平位置
h : SV層高さ。
例において、水線(ドラフト)以下のソーナ深さは、4フィートです。屈折させられた音線は、グリーン、直線で結ばれた音線は赤で示されています。
上図は垂直-水平方向が1:1で描かれたものです。1つ明白なことは:深さは、レイ・トレーシングの対比とは異なって測定されていることです。
計算の前に非同種の弾力のある物質中の波の伝送を制御スネルの法則の基礎を理解することが必要です。:
sin(θ1) / V1 = sin(θ2) / V2 = sin(θn) / Vn = p
θ 鉛直方向に対する角度
V 音速度
p (一定の)音線パラメータである。
まず、ソナーによって供給された2つの測定を考察する; (1)スラントレンジr = 80.06フィート、及び、(2)初期ビーム角θ= 45度。(もちろん、ピッチ、ロール、マウンティングオフセットが加味されたものである)。
この例の場合、初期ビーム角45度、及び、表面音速度4730、音線パラメータp = 1.4949E-4を鳴らす。ダイアグラムにしめされた角度は簡単に計算できます。:
θn= p * Vn
θ1= p * V1= 45.00度。
θ2= p * V2= 45.55度。
θ3= p * V3= 45.77度。
次のステップは、各層を進行する傾斜距離rnを計算することです。:
rn = hn / cos(θn)
その式は、最初の2つの層で使用されます。第3の層は、我々は、トータルの傾斜範囲からの最初の2つの層で進行した距離を単に減じることで求められます。
r1 = h1 / cos(θ1)= 8.49 feet (h1 はドラフト6 feetが調整済み)
r2 = h2 / cos(θ2)= 28.56 feet
r3 = r – (r1 + r2) = 43.01 feet
測深値を計算するために、我々は、各層を進行する垂直方向の距離dを必要とします。最初の2つの層においてそれは、容易です。–単に層の高さとなります。第3の層では再び三角法に頼ることになります。:
dn = rn * cos(θn)
d3 = r3 * cos(θ3) = 30.00 feet
層の加算は、56.00フィート+ 4フィートドラフト修正=60.00フィートの補正されていない深さを導きます。
水平の距離sが各層において進行する様子も同時に必要とします。:
sn = rn * sin(θn)
s1 = r1 * sin(θ1) = 6.00 feet
s2 = r2 * sin(θ2) = 20.39 feet
s3 = r3 * sin(θ3) = 30.82 feet
加算によりトータルのオフセットs = 57.21フィートが導かれます。
いかにレイ・トレーシングが深さに、計算の相殺に影響をもたらすかを示すために、以下の表は、レイ・トレーシングを行った場合と行わない場合の比較を行っています。
|
|
深さ |
オフセット |
|---|---|---|
|
レイトレースあり |
60.00 |
57.21 |
|
レイトレースなし |
60.61 |
56.61 |
|
パーセント差異 |
1.0パーセント |
1.0パーセント |
最終的に、ソーナヘッドのXYポジション、及び、ボートの方向のデータが得られれば、最終測深ポイントXYZは、計算することが可能です。
結論:
2つの結果が得られます。:
(1)マルチ‐ビームを使用した測深ではレイトレースが必須であること。
(2)レイトレースの計算にはコンピュータが最適であるということ。
Qシングルビームの音速度補正について
FAQ ID:Q16-2
補正はウォーターカラムでの離散的な間隔の音速度の測定された音速度プロファイルから始まります。
左下で示されるプロフィールは、感潮河川で1mおきに測定された典型的なサンプルです。
上層から下層までで約2.5%の変化があります。
右下に示される2つ目のプロファイルでは手計算により後に示す簡易計算により3点のみの音速度で作成されています。

以下に示す表はおおよそのプロファイルを示します。
|
Layer End Depth (m) |
Layer Height – h (m) |
Sound Velocity – V (m / s) |
|---|---|---|
|
3 |
3 |
1449 |
|
9 |
6 |
1465 |
|
15 (bottom of cast) |
Unlimited |
1479 |
最後の層の高さは無制限となります。
計算例
測深器で音速度を1480 m/sに設定し、17.13 mが計測されました。 1mの喫水も測深器に入力します。上記の簡略化されたプロファイルを音速度補正として使用します。
最初に、深さは表面から底まで一方向の経過時間(1m当たり進むためにかかる時間)tに変換されます。:
t = 測深器の深度/ 測深器の音速度
t = 0.011575 seconds
プロファイルを使用した音速度補正にHypackでは各層におけるトラベルタイムを使用します。
最初の層では音波は3m進むのに0.002070秒かかります。(t= 層の厚み/ 最初の層の音速度 = 3/1449). その時間をトータルの所要時間から減じると0.009505秒残ります。
次の層では6m進のに音速度1465 m/sで0.004096秒かかります。2番目の層から海底まで要する残りの時間はトータルの時間より1番目と2番目の層にかかる時間を引いた結果となり 0.005409秒になります。残りの時間で音波が最後の層を進む距離はt*SV = 0.005409*1479 = 8.00 m
従って最終的な測深値は: 3 m (1番目の層) + 6 m (2番目の層) + 8 m (最後の層) = 17 m
従って音速度補正値は17.00 (真の測深値) – 17.13 (測深器の計測した測深値) = -0.13 m
Qユーザー定義のデータ出力(User-Defined Output)
FAQ ID:Q16-4
User-Defined Outputは、最新のHYPACKR Maxで追加された新しいユーティリティープログラムです。このプログラムは、編集済ファイル(ALL Format)を分解し、そのファイルに含まれる 情報をユーザが指定したファイルに書き出す事が可能です。このプログラムは、ログ ファイルや個々のデータファイルを入力として指定できます。同じような 機能を持つExport (Reformat) プログラムは多くの出力オプションを持っていますが、私たちは多くのユーザーから標準的なXYZファイルの様々なフォーマットの出力要求を受けてきまし た。(例:event XYZ, XYZ Tide, YXZ等.)。そこで、 Export プログラムにこれらのフォーマットを追加するよりはむしろ、ユーザが定義した様々なフォーマットに対応した出力ができるツールのほうが役立つだろうと考 え、User-Defined Output プログラムを用意しました。
操作手順を以下に示します。
プログラムを実行し、抽出元となる編集済ログファイル等を選択します。さらに、出力するファイルの名前も決定します。"Available" 項目のリストを参照して出力したい項目を選択します。"Available"項目のリストには3つのユーザ定義文字列も含まれます。項目を選択した後、選 択した項目の順序でファイルに書き出されます。また、各項目をコンマやスペースを使って区切る事や水深値の符号を逆にする事も可能です。

User Defined Output Program
Output file created from User Defined Output Program
QシングルビームエディターにおけるRTK-GPS潮位データの処理(Elevation Mode and RTK Tides in the Single Beam Editor)[英語]
FAQ ID:*Q16-5S
Recently, we had an situation where one of our users was using RTK (Real Time Kinematic) tide corrections while processing their survey data in elevation mode. When the data was read into the Single Beam Editor, the calculations were incorrect.
With closer examination of the measurements and the calculations that occur, we determined that when you convert single beam data to elevation mode and are using RTK tide corrections, an additional adjustment is required. The tide correction value must be negated.
Let's take a closer look.
Most surveys are done in Depth Mode where the sounding depths are positive values. In Hypack® Max, the tide correction value is added to the sounding depth to remove the effects of the change in tide. Since we want to remove this amount from the sounding depths, the value must be negative. [C = A + (-B)]
For example:
Where A = 30, B = 5, C = 25, the equation becomes 25 = 30 + (-5).
In Elevation Mode, the sounding depths are negative. The tide corrections, therefore, must be positive. Using the example above, the equation becomes -25 = -30 + 5.
For Single Beam surveys:
- Convert the Depths to Elevation Mode by selecting Depths--Invert Only in the Read Parameters dialog.
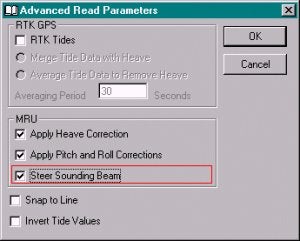
- Convert the tide correction from negative to positive by checking the Invert Tide Values box in the Advanced Read Parameters dialog in the Single Beam Editor.
For Multibeam surveys all corrections are automatically adjusted by the Hysweep Editor without further action by you.
QXYZデータファイルの結合(Merging XYZ Data Files)
FAQ ID:Q16-6
2つのXYZファイルを結合するには、エディター上で結合する若しくはDOSコマンドで以下の様に入力することで簡単に実行できます。
copy file1.xyz+file2.xyz file3.xyz.
通常はこの方法で十分な結果が得られるでしょう。
浚渫後の地形ファイルであるfile2.xyzのエリアが浚渫前の地形ファイルであるfile1.xyzのエリアより狭い場合、通常必要なデータは file2.xyzのエリアのみ置きかえられたXYZファイルを作成することでしょう。この値を全自動で計算する方法はHypackには存在しません。 Hypackでこの値を求めるには以下の手順を実行することで可能です。
- file1.xyzファイルをプロジェクトに読み込みます。
- Border editorを使用してfile file1.brdファイルを作成します。このとき境界線を構成する点の最後の点を囲みたいエリアの外に設定します。
- file1.xyz上で右クリックし、Clip to Borderを選択し、file1.brdファイルでデータをクリップします。
- file2.xyzをプロジェクトに読み込みます。
- Border editorでfile1.brdファイルを読み込み、最後の点を、囲みたいエリアの内側に設定し直して、再度.file2.brdとして保存します。
- file1.xyzと同様にクリップされたファイルを作成します。
- 上記手順で作成した2つのファイルを結合することで浚渫エリアの測深データのみが置きかえられたXYZファイルが作成できます。Tinモデルプログラムを使用して上記と同様なことを実行する場合、"Tin to Tin"法を選択してTinモデルを作成します。その後Exportメニューより任意のメニューを選択することで、様々なデータを出力することができます。
Q水深データの処理(Sorting Elevation Data)
FAQ ID:Q16-7
以前、同一週、同一エリア調査されたにもかかわらず、結果が大きく異なるデータがありました。
2つのデータはHypackのSortプログラムで並び替えられたXYZファイルです。これらのデータはSortプログラムの半径の設定を5フィートで並 び替えしたものです。Sortプログラムは設定された範囲内の最浅値を採用するようになっています。一般的にほとんどのデータではこの処理は問題なく動作 していました。
ただし、今回のデータでは少々手を加える必要がありました。
Hypackでは通常測深値をプラスの値として扱います。逆に標高値はマイナスとして扱っています。従って10mから20mの測深データを扱う場 合、Sortプログラムでは10mの測深値を採用します。しかし、-10mから-20mの測深データを扱う場合は-20mの値を採用します。従って、標高 データを扱っている場合は、標高データが全てプラスの値となるように変換しなければなりません。
つまり今回のデータは片方が測深値をプラスとして扱っており、もう一方が測深値をマイナスとして扱っていたために発生したものでした。
上記のような問題がありますのでSortプログラムを使用する場合は測深値の符号に注意してください。
Qリマッププログラムが曲線を含んだ測線の処理が可能に(Curved Lines Added to Re-map)
FAQ ID:Q16-8
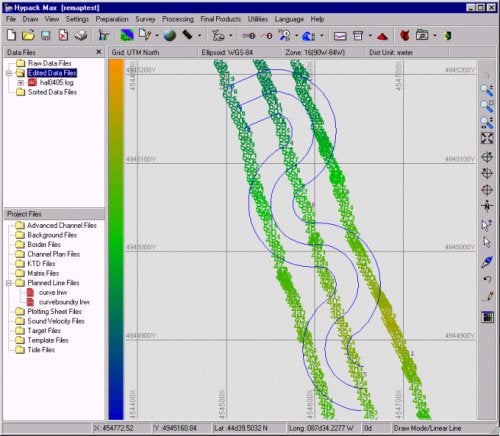
Remapプログラムが曲線を含んだファイルに対応しました。RemapプログラムはHYPACK® All FormatファイルからASCII xyzファイルを作成またはHYPACK® All Formatファイルを再作成するユーティリティーです。測深値は選択されたラインに従い任意の位置に出力することが可能です。
以下に示された図は、センターラインより左右に25feet離れた位置に1本ずつ測線が描かれている例です。
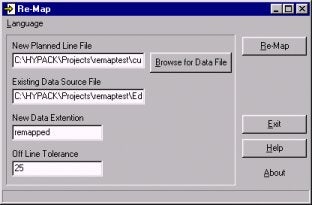
Re-mapプログラムを以下の設定にて実行します。
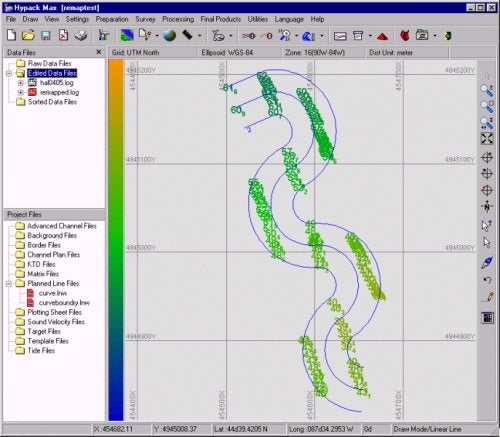
結果は以下の通りとなります。
Qシングルビームエディターにおけるビームステアリング(Beam Steering in the Single Beam Editor)[英語]
FAQ ID:*Q16-9M
The beam steering option in the single beam editor controls the depth and location of Hypack® soundings. The default setting is off (do not steer the beam), which is correct for most installations. There are certain circumstances where beam steering is desirable, which of course is why we put it in the program.
What is beam steering? It is the aiming of the sounding beam in the direction given by the pitch and roll sensor. Just like a flashlight. If you do not have a pitch and roll sensor, obviously you do not want beam steering. If you have a wide angle transducer, you still do not want beam steering (for less obvious reasons described below). If you have a narrow beam transducer, a pitch / roll sensor and you work in rough water, you may want to steer the beam.
First, we look at a sounding taken in calm water over a relatively flat bottom. Narrow beam or wide beam, beam steering or not, sounding depth and location will be the same and correct.
Next we look at a sounding taken in calm water on a steep slope. The echosounder returns a depth corresponding to the first return, which in this case is not directly under the transducer. Note that the error increases with beam width, which is a good argument for using a narrow beam transducer.
(Methods exist to "migrate" the sounding to it's proper depth and location but to my knowledge, no one uses them.)
In the two examples above, beam steering has not been an issue because the beam is close to vertical. Now we examine a few cases where the beam is not vertical, i.e., pitch and roll angles are involved.
The first diagram to the left shows the case of the wide beam transducer. The depth returned from the echosounder is the true depth directly beneath the transducer. It will be recorded properly by Hypack® when beam steering is off. If beam steering is on, it will be recorded forward and slightly shallower than actual. Moral is: don't use beam steering with wide angle transducers.
The final example shows a narrow beam pitched forward. The actual sounding point is the closest bottom point within the cone of sound. Note that the sounding point calculated without beam steering is slightly off as is the sounding point calculated with beam steering!
This is getting complicated, but at least one thing is clear: when the combined pitch and roll angle is less than the beam width, do not use beam steering. I think this covers all protected water surveys, regardless of beam width. For open water surveys, consider beam steering when the boat attitude angle is much greater than the beam width. If the boat is rolling +/- 10 degrees with a 3 degree transducer, definitely consider beam steering.